由于本人主要是搞软件的,所以硬件方面不是很了解,但是为了更好地相互学习,仅此整理出一份总结出来,有什么错误的地方还请大家积极的指出!供大家一起参考研究!
我们做的智能小车,要想出色的完成一场比赛,需要出色的控制策略!就整个智能车这个系统而言,我们的被控对象无外乎舵机和电机两个!通过对舵机的控制能够让我们的小车实时的纠正小车在赛道上的位置,完成转向!当然那些和我一样做平衡组的同学不必考虑舵机的问题!而电机是小车完成比赛的动力保障,同时平衡组的同学也需要通过对两路电机的差速控制,来控制小车的方向!所以选一个好的电机驱动电路非常必要!
常用的电机驱动有两种方式:一、采用集成电机驱动芯片;二、采用MOSFET和专用栅极驱动芯片自己搭。集成主要是飞思卡尔自己生产的33886芯片,还有就是L298芯片,其中298是个很好的芯片,其内部可以看成两个H桥,可以同时驱动两路电机,而且它也是我们驱动步进电机的一个良选!由于他们的驱动电流较小(33886最大5A持续工作,298最大2A持续工作),对于我们智能车来说不足以满足,但是电子设计大赛的时候可能会用到!所以想要详细了解他们的同学可以去查找他们的数据手册!在此只是提供他们的电路图,不作详细介绍!

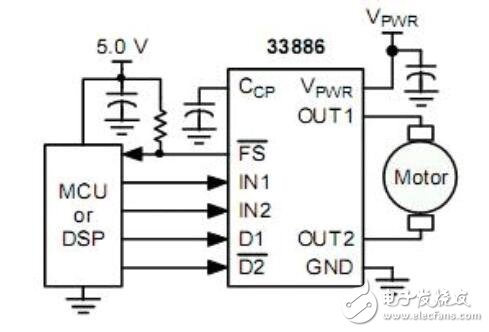
33886运用电路图
下面着重介绍我们智能车可能使用的驱动电路。普遍使用的是英飞凌公司的半桥驱动芯片BTS7960搭成全桥驱动。其驱动电流约43A,而其升级产品BTS7970驱动电流能够达到70几安培!而且也有其可替代产品BTN7970,它的驱动电流最大也能达七十几安!其内部结构基本相同如下:
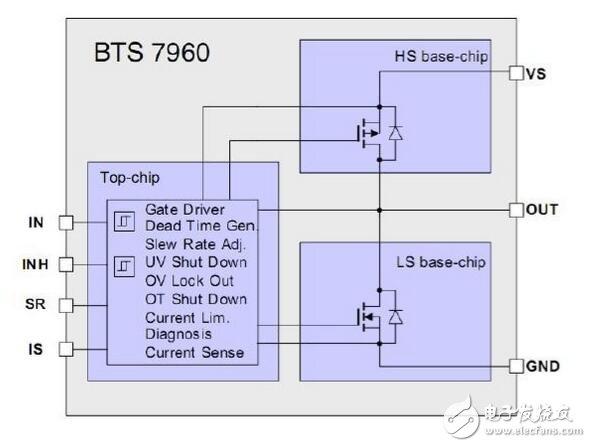
每片芯片的内部有两个MOS管,当IN输入高电平时上边的MOS管导通,常称为高边MOS管,当IN输入低电平时,下边的MOS管导通,常称为低边MOS管;当INH为高电平时使能整个芯片,芯片工作;当INH为低电平时,芯片不工作。其典型运用电路图如下图所示:
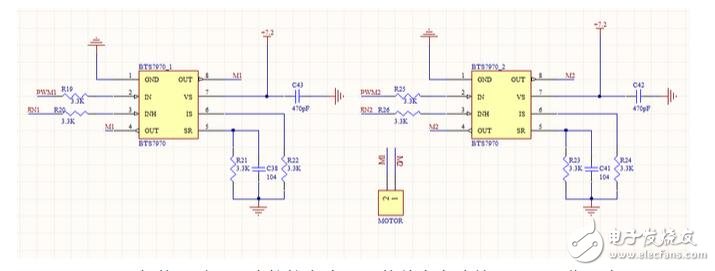
EN1和EN2一般使用时我们直接接高电平,使整个电路始终处于工作状态!
下面就是怎么样用该电路使得电机正反转?假如当PWM1端输入PWM波,PWM2端置0,电机正转;那么当PWM1端为0,PWM2端输入PWM波时电机将反转!使用此方法需要两路PWM信号来控制一个电机,光电平衡组的同学更是需要4路!有点浪费!其实可以只用一路PWM接PWM1端,另外PWM2端可以接在IO端口上,用于控制方向!假如PWM2=0;PWM1输入信号时电机正转,那么当PWM2=1是,PWM1输入信号电机反转(必须注意:此时PWM信号输入的是其对应的负占空比)!
对于以上的电路,今年的电磁组A车和光电组D车来说,其驱动电流已经能够满足,但是对于今年的摄像头组的B车模来说,可能有点吃力,B车的电机功率很大,虽然正常正转时的电流不是很大,但是当我们加上我们的速度控制策略的时候,很多时候车子是在不停的加减速,这就需要电机不停的正反转,此时的电流很大,还用以上的驱动电路,芯片会很烫!!这个时候就需要我们自己用MOSFET和栅极驱动芯片自己设计H桥!
首先以学校提供给大家实验的驱动板上的电路图来简单介绍基本原理:
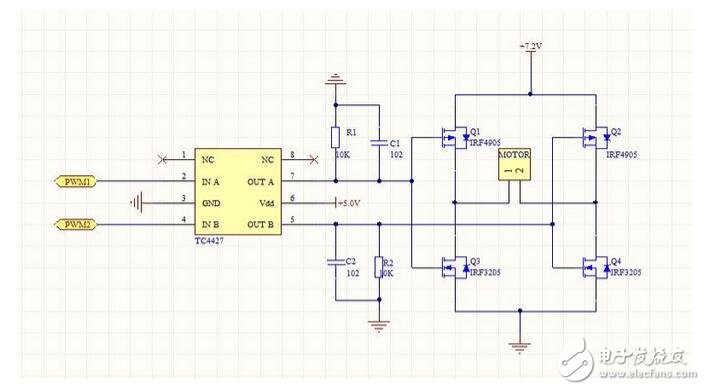
首先需要我们了解的是TC4427是一个1.5A双通道高速的MOSFET驱动器,顾名思义,其内部有两路同相驱动电路A和B。
上面的电路中4905是P沟道,3205是N沟道,大家都学过数电模电,即使没有学过他们的导通条件也都应该了解!现假设PWM2=0,即Q2导通,Q4不导通!那么当PWM1=1时,Q1不导通,Q3导通,电流的方向为Q2—电机—Q3,电机正转,当PWM1=0时,Q1导通,Q3不导通,即上桥臂导通,电机处于能耗制动状态!
同理不难得出:当PWM1=0是,PWM2=1时,电机反转;PWM2=0是下桥臂导通,电机处于能耗制动状态!上面电路中的电阻电容R1和C1并联接地,R2和C2并联接地,主要作用是构成阻容滤波,滤除尖脉冲!有时为了进一步的扩大驱动电流,还常常两两并联,用两片3205并联成一片,两片4905并联成一片!组成的H桥的驱动电路电流将更大!
其实TC4427只是两路同相的驱动器,买过该芯片的同学可能知道,虽说不贵,但是也需要9块钱左右,而且用过该芯片的同学也可能有体会,该芯片不是太好,有时会出现一个方向可以转,另一个方向不可以转的情况,我们是不是可以用其他既廉价又有同样效果的芯片代替呢?其实我们可以想到的是我们常用的74LS00,没错,就是与非门,用它接成两路同相的驱动器,该电路同样好用,我所知道的队伍中有人在用!
通过对上面电路的了解,大家应该大致了解了H桥的基本工作原理,有没有更好地驱动电路了呢?答案是肯定的!以下是直流电动机的机械特性表达式:
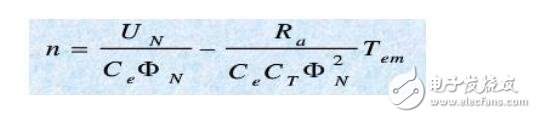
n是电机的转速,NU是电机的两端的电压,eC、TC、Nφ对于我们来说可以看成一个定值,emT是负载转矩,车做好之后该值基本确定不变,剩下一个重要的参数aR电机电枢回路的阻值,电机本身的内阻很小,如果外部引入的电阻过大,此时直流电动机转速降落较大,驱动电路效率较低,电机性能不能充分发挥。为了提高电机的转速我们应该尽量减小电机电枢回路绕组的阻值,我们知道:N沟道的MOSFET具有极低的导通电阻,IRF3205导通电阻在8m?左右,而IRF4905几乎是其两倍,那么是不是可以考虑全部使用N沟道的3205来搭我们的驱动电路呢,答案也是肯定的,只不过需要换一片栅极驱动芯片就行!
在这里给大家介绍的是IR公司的IR2104,因为IR公司号称功率半导体领袖,当然2104也相对比较便宜!IR2104可以驱动可以驱动高端和低端两个N沟道MOSFET,能提供较大的栅极驱动电流,并具有硬件死区、硬件防同臂导通等功能。使用两片IR2104型半桥驱动芯片可以组成完整的直流电机H桥式驱动电路。但是需要12V驱动!
IR2104基本应用电路:
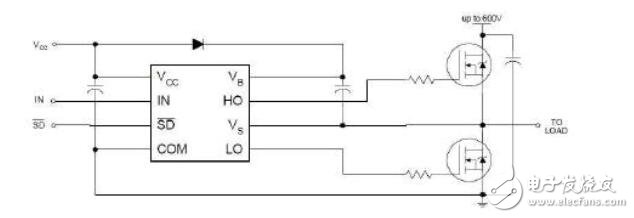
SD信号时一个使能信号,跟前面的BTS的INH信号输入端类似,高电平有效,芯片工作,IN为高电平时HO为高,LO为低,IN为低电平时,HO为低,LO为高电平!
关于其中关键参数的选择:
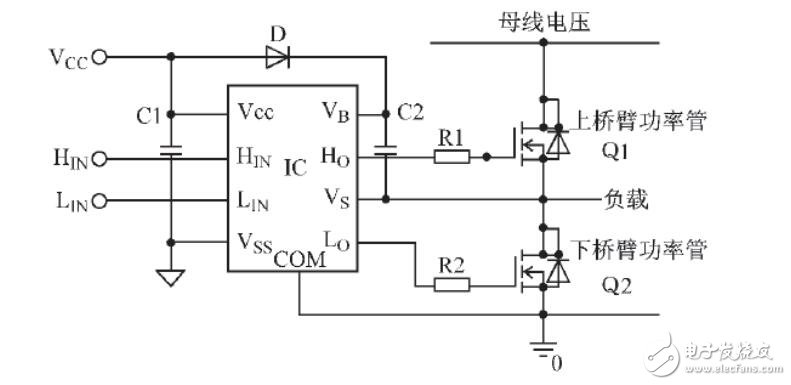
这个驱动设计单从信号逻辑上分析比较容易理解,但要深入的理解和更好的应用,就需要对电路做较深入的分析,对一些外围元件的参数确定做理论分析计算。图中IC是一个高压驱动芯片,驱动1个半桥MOSFET。Vb,Vs为高压端供电;Ho为高压端驱动输出;COM为低压端驱动供电,Lo为低压端驱动输出;Vss为数字电路供电.此半桥电路的上下桥臂是交替导通的,每当下桥臂开通,上桥臂关断时Vs脚的电位为下桥臂功率管Q2的饱和导通压降,基本上接近地电位,此时Vcc通过自举二极管D对自举电容C2充电使其接近Vcc电压。当Q2关断时Vs端的电压就会升高,由于电容两端的电压不能突变,因此Vb端的电平接近于Vs和Vcc端电压之和,而Vb和Vs之间的电压还是接近Vcc电压。当Q2开通时,C2作为一个浮动的电压源驱动Q2;而C2在Q2开通其间损失的电荷在下一个周期又会得到补充,这种自举供电方式就是利用Vs端的电平在高低电平之间不停地摆动来实现的.由于自举电路无需浮动电源,因此是最便宜的,如图所示自举电路给一只电容器充电,电容器上的电压基于高端输出晶体管源极电压上下浮动。图中的D和C2是IR2104在脉宽调制(PWM)应用时应严格挑选和设计的元器件,根据一定的规则进行计算分析;并在电路实验时进行调整,使电路工作处于最佳状态,其中D是一个重要的自举器件,应能阻断直流干线上的高压,其承受的电流是栅极电荷与开关频率之积,为了减少电荷损失,应选择反向漏电流小的快恢复二极管,芯片内高压部分的供电都来自图中自举电容C2上的电荷;为保证高压部分电路有足够的能量供给,应适当选取C2的大小。
供参考的电路,其中的参数参考北科大技术报告:
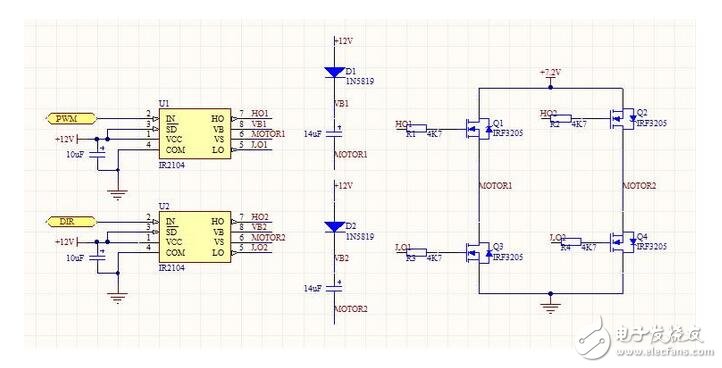
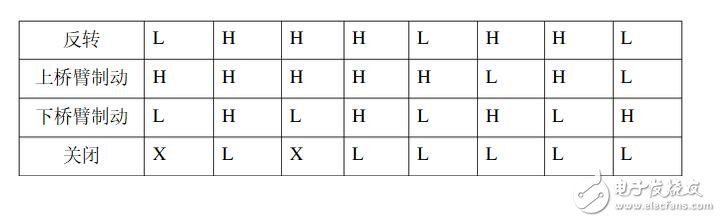
其工作的原理在此不在赘述仅提供其工作的真值表,如下:

IR2104比较便宜,有钱的同学可以再去研究研究TD340,基本原理都是大同小异!


