如今无人机成为了展会最大的热点之一,大疆(DJI)、Parrot、3D RoboTIcs、AirDog等知名无人机公司都有展示他们的最新产品。甚至是英特尔、高通的展位上展出了通信功能强大、能够自动避开障碍物的飞行器。无人机在2015年已经迅速地成为现象级的热门产品,甚至我们之前都没有来得及细细研究它。与固定翼无人机相比,多轴飞行器的飞行更加稳定,能在空中悬停。主机的硬件结构及标准的遥控器的结构图如下图。


四轴飞行器系统解析图
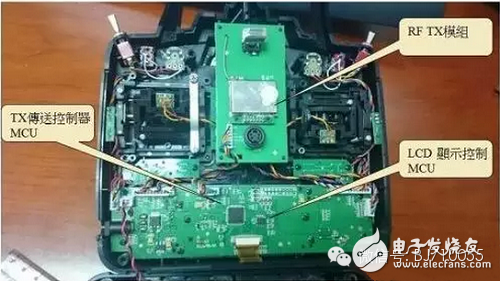
遥控器系统解析图
以上只是标准产品的解剖图,有些更加高级的如针对航模发烧友和航拍用户们的无人机系统,还会要求有云台、摄像头、视频传输系统以及视频接收等更多模块。
飞控的大脑:微控制器
在四轴飞行器的飞控主板上,需要用到的芯片并不多。目前的玩具级飞行器还只是简单地在空中飞行或停留,只要能够接收到遥控器发送过来的指令,控制四个马达带动桨翼,基本上就可以实现飞行或悬停的功能。意法半导体高级市场工程师介绍,无人机/多轴飞行器主要部件包括飞行控制以及遥控器两部分。其中飞行控制包括电调/马达控制、飞机姿态控制以及云台控制等。目前主流的电调控制方式主要分成BLDC方波控制以及FOC正弦波控制。
新唐的MCU负责人表示: 多轴飞行器由遥控, 飞控,动力系统, 航拍等不同模块构成, 根据不同等级产品的需求,会采用到不同CPU内核。例如小四轴的飞行主控, 因功能单纯, 体积小, 必须同时整合遥控接收, 飞行控制及动力驱动功能;中高阶多轴飞行器则采用内建 DSP 及浮点运算单元的, 负责飞行主控功能,驱动无刷电机的电调(ESC)板则采用MINI5系列设计。低阶遥控器使用 SOP20 封装的4T 8051 N79E814;中高阶遥控器则采用Cortex-M0 M051系列。另外, 内建ARM9及H.264视频边译码器的N329系列SOC则应用于2.4G及5.8G的航拍系统。
在飞控主板上,目前控制和处理用得最多的还是MCU而不是CPU。由于对于飞行控制方面主要都是浮点运算,简单的ARM Cortex-M4内核32位MCU都可以很好的满足。有的传感器MEMS芯片中已经集成了DSP,与之搭配的话,更加简单的8位单片机也可以做到。
——————
汽车电子技术设计方案请点击进入》》》
技术专区
- 聚焦IoT及车载电子 理光微电子深耕中国市场
- 泰科电子(TE Connectivity)亮相2018慕尼黑上海电子展 以创新科技连动
- 雷达没那么神秘就这点事!
- 基于树莓派的多串口多总线服务器设计
- 基于AD9371的经典小尺寸卫星通信解决方案


