20余种液位测量方法分析比较
物位包括液位和料位两类。液位又包括液位信号器和连续液位测量两种。液位信号器是对几个固定位置的液位进行测量,用于液位的上、下限报警等。连续液位测量是对液位连续地进行测量,它广泛地应用于石油、化工、食品加工等诸多领域,具有非常重要的意义。文中对20余种连续液位测量方法进行比较分析。
1、玻璃管法、玻璃板法、双色水位法、人工检尺法
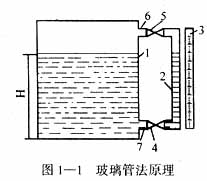
玻璃管法:该方法利用连通器原理工作,如图1—1所示[1]。图中1-被测容器;2-玻璃管;3-指示标度尺;4、5-阀;6、7-连通管。液位直接从指示标度尺读出。

 双色水位计法:该方法利用光学原理,使水显示绿色,而使水蒸汽显示红色,从而指示出水位[2]。
双色水位计法:该方法利用光学原理,使水显示绿色,而使水蒸汽显示红色,从而指示出水位[2]。人工检尺法:该方法用于测量油罐液位。测量时,测量员把量油尺投入油品中,并在尺砣与罐底接触时提起量油尺。根据量油尺上的油品痕迹,读出油面高度;根据量油尺末端试水膏颜色的变化确定水垫层的高度,从而确定油高和水高[3]。
以上4种方法都是人工测量方法,具有测量简单、可靠性高、直观、成本低的优点。
2、吹气法、差压法、HTG法
吹气法:该方法的工作原理如图2—1所示[4]。图中,1-过滤器;2-减压阀;3-节流元件;4-转子流量计;5-变送器。因吹气管内压力近似等于液柱的静压力,故 P=ρgH
 差压法:该方法的工作原理如图2-2所示[4]。图中,1、2-阀门;3-差压变送器。对于开口容器或常压容器,阀门1及气相引压管道可以省掉。压力差与液位的关系为 ΔP=P2-P1=ρgH
差压法:该方法的工作原理如图2-2所示[4]。图中,1、2-阀门;3-差压变送器。对于开口容器或常压容器,阀门1及气相引压管道可以省掉。压力差与液位的关系为 ΔP=P2-P1=ρgH

式中:ΔP-变送器正、负压室压力差;P2、P1-引压管压力;H-液位。差压变送器将压力差变换为4~20 mA的直流信号。如果压力处于测量范围下 限时对应的输出信号大于或小于4 mA,则都需要采用调整迁移弹簧等零点迁移技术,使之等于4 mA。
 HTG法:该方法应用于油罐差压液位测量中,如图2—3所示。图中:P1、P2、P3-高精度压力传感器;RTD-温度检测元件;HIU-接口单元。P1位于罐底附近 的罐壳处,P2比P1高
HTG法:该方法应用于油罐差压液位测量中,如图2—3所示。图中:P1、P2、P3-高精度压力传感器;RTD-温度检测元件;HIU-接口单元。P1位于罐底附近 的罐壳处,P2比P1高 式中:G-油品重量;Sav-油罐平均截面积;ρav-介于压力传感器P1、P2之间油品平均密度;g是重力加速度;H是压力传感器P1、P2之间的距离;h是油品高度;h0是压力传感器P1的高度。RTD用于测量油品温度,以对测量数值进行温度补偿。HTG测量系统价格较低,但液位测量精度较低,安装须在罐壁开孔。
式中:G-油品重量;Sav-油罐平均截面积;ρav-介于压力传感器P1、P2之间油品平均密度;g是重力加速度;H是压力传感器P1、P2之间的距离;h是油品高度;h0是压力传感器P1的高度。RTD用于测量油品温度,以对测量数值进行温度补偿。HTG测量系统价格较低,但液位测量精度较低,安装须在罐壁开孔。以上3种方法都是利用液体的压力差来测量液位的。
3、浮子法、浮筒法、浮球法、伺服法、沉筒法
浮子法:该方法采用浮子作为液位测量元件,并驱动编码盘或编码带等显示装置,或连接电子变送器以便远距离传输测量信号。
 浮筒法:该方法采用中间带孔的磁浮筒作为液位敏感元件,如图3—1所示。不锈钢套管从浮筒中间孔穿过,固定在罐顶和罐底之间。液位变化带动空心磁浮筒(内藏永久磁铁)沿套管上下移动,并吸引套管内的磁铁沿套管内壁上下移动,二次仪表根据磁铁的移动量计算出液位。
浮筒法:该方法采用中间带孔的磁浮筒作为液位敏感元件,如图3—1所示。不锈钢套管从浮筒中间孔穿过,固定在罐顶和罐底之间。液位变化带动空心磁浮筒(内藏永久磁铁)沿套管上下移动,并吸引套管内的磁铁沿套管内壁上下移动,二次仪表根据磁铁的移动量计算出液位。浮球法:该方法利用杠杆原理工作,如图3—2所示[4]。图中:1-浮球;2-连杆;3-转轴;4-平衡重;5-杠杆。浮球跟随液位变化而绕转轴旋转,带动转轴上的指针转动,并与杠杆另一端的平衡重平衡,同时在刻度盘上指示出液位数值。浮球法有内浮球式和外浮球式两种,如图3—2所示。浮球法主要用于测量温度高、粘度大的液位,但量程较小。
 伺服法:该方法采用波动积分电路,消除抖动、延长寿命、提高液位测量精度。现代伺服液位仪的测量精度较高,已达到
伺服法:该方法采用波动积分电路,消除抖动、延长寿命、提高液位测量精度。现代伺服液位仪的测量精度较高,已达到
 沉筒法:沉筒的位置随着液位的变化而变化,但其变化量并不与液位变化量相等。在图3-
沉筒法:沉筒的位置随着液位的变化而变化,但其变化量并不与液位变化量相等。在图3-以上5种方法都是利用浮力原理来工作的。
4、电容法、电阻法、电感法
电容法:用于测量非导电液体的电容法原理如图4—1所示[4]。图4—1中,电容由两块同心的圆柱面极板组成,其电容量CH为
 上式中:ε1-被测液体的相对介电常数;ε2-气相介质的相对介电常数;H-电容传感器浸入液体的深度(m);l-电容传感器垂直高度(m);R-内极板圆柱底面半径(m);r-外极板圆柱底面半径(m)。由于R、r、l等都是固定值,只要利用ε1、ε2、CH就能计算出液位H。图4—2是用于测量导电液体的电容法原理[4],其公式推导略。电容式液位仪价格较低,安装容易,且可以应用于高温、高压的场合。但电容液位仪测量重复精度较低,需定期维修和重新标定,工作寿命也不是很长。
上式中:ε1-被测液体的相对介电常数;ε2-气相介质的相对介电常数;H-电容传感器浸入液体的深度(m);l-电容传感器垂直高度(m);R-内极板圆柱底面半径(m);r-外极板圆柱底面半径(m)。由于R、r、l等都是固定值,只要利用ε1、ε2、CH就能计算出液位H。图4—2是用于测量导电液体的电容法原理[4],其公式推导略。电容式液位仪价格较低,安装容易,且可以应用于高温、高压的场合。但电容液位仪测量重复精度较低,需定期维修和重新标定,工作寿命也不是很长。
 电阻法:该方法[5]特别适用于导电液体的测量,敏感器件具有电阻特性,其电阻值随液位的变化而变化,故将电阻变化值传送给二次电路即得到液位。探针式利用跟踪测量法来测量液位,以液位上升的情形为例来说明液位测量原理,当液位上升时,提起探针完全脱离液体,然后缓慢降低探针寻找液面,则探针与液体刚接触时的位置即与液位相对应。探针式的特点是测量精度很高、控制电路复杂。
电阻法:该方法[5]特别适用于导电液体的测量,敏感器件具有电阻特性,其电阻值随液位的变化而变化,故将电阻变化值传送给二次电路即得到液位。探针式利用跟踪测量法来测量液位,以液位上升的情形为例来说明液位测量原理,当液位上升时,提起探针完全脱离液体,然后缓慢降低探针寻找液面,则探针与液体刚接触时的位置即与液位相对应。探针式的特点是测量精度很高、控制电路复杂。电感法:该方法[5]适用于导电液体的液位测量,特别是液态金属。电感法的原理是,液位变化使得电感元件的自感、互感或导磁率发生变化,故将该变化量送往二次电路即可得到相应的液位数值。电感法应用最为广泛的是高频液位计。该液位计的测量原理是,频率调制信号通过射频电缆耦合到传输线传感器谐振回路,谐振回路的输出电压经过检波电路和射频电缆传送给低通滤波器,然后根据低通滤波器的输出电压控制调谐电路,产生新的振荡频率,直到传感器谐振电路处于完全谐振状态为止,则此时的振荡频率即与传感器的电感量相对应,从而与液位相对应。
以上3种方法都是利用液位传感器的电参数产生变化的方法来测量液位的。
5、磁致伸缩法、超声波法、调制型光学法、微波法
磁致伸缩法:该方法用于测量油罐液位的原理如图5—1所示[6]。图5—1中有两个浮子,分别用来检测油气界面和油水界面。各浮子内都藏有一组永久磁铁,用来产生固定磁场。测量时,液位计头部发出低电流“询问”脉冲,该电流产生的磁场沿波导管向下传导。当电流磁场与浮子磁场相遇时,产生“返回”脉冲(也称“波导扭曲”脉冲)。询问脉冲与返回脉冲之间的时间差即对应油水界面和油气界面的高度。磁致伸缩液位计安装容易,测量精度很高,但液体密度变化和温度变化会带来测量误差[7],浮子沿着波导管外的护导管上下移动,容易被卡死。
 超声波法:换能器将电功率脉冲转换为超声波,射向液面,经液面反射后再由换能器将该超声波转换为电信号。超声波是机械波,传播衰减小,界面反射信号强,且发射和接收电路简单,因而应用较为广泛;但超声波的传播速度受介质的密度、浓度、温度、压力等因素影响,其测量精度较低。
超声波法:换能器将电功率脉冲转换为超声波,射向液面,经液面反射后再由换能器将该超声波转换为电信号。超声波是机械波,传播衰减小,界面反射信号强,且发射和接收电路简单,因而应用较为广泛;但超声波的传播速度受介质的密度、浓度、温度、压力等因素影响,其测量精度较低。微波法:微波通过天线(大多为口径天线,也有平面天线)辐射出去,经液面反射后被天线接收,然后由二次电路计算发射信号与接收信号的时间差得液位。连续波雷达液位仪原理如图5—2所示,该液位仪采用三角波频率调制形式,并通过对发射信号与接收信号混频后得到的差额信号的分析,得到微波传输时间,从而计算出液位。微波速度受传播介质、温度、压力、液体介电常数的影响很小,但液体界面的波动、液体表面的泡沫、液体介质的介电常数对微波反射信号强弱有很大影响。当压力超过规定数值时,压力对液位测量精度将产生显著影响。对于介电常数小于规定数值的液体,大部分雷达液位仪都需要采用波导管,但波导管的锈蚀、弯曲和倾斜都会影响测量精度。例如:当空高h为
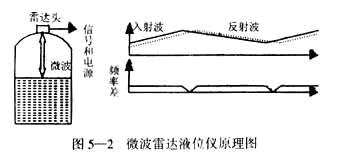 雷达液位仪特别适合于高污染度或高粘度的产品,如沥青等。雷达液位仪测量的重复精度较高,无须定期维修和重新标定,测量精度也较高,但价格较高,测量油水界面困难。
雷达液位仪特别适合于高污染度或高粘度的产品,如沥青等。雷达液位仪测量的重复精度较高,无须定期维修和重新标定,测量精度也较高,但价格较高,测量油水界面困难。调制型光学法与微波法类似,只是采用相位或频率调制的光信号代替微波信号。图5—3是一种激光雷达液位仪原理图[8]。但光信号受水蒸汽、油蒸汽影响较大,并对液面波动很敏感,且必须采用易受污染的光学镜头。
 以上3种方法都是通过检测信号传播的时间来确定液位的。设发射信号与接收信号的时间差为t,则空高h=vt/2,v为波的传播速度。
以上3种方法都是通过检测信号传播的时间来确定液位的。设发射信号与接收信号的时间差为t,则空高h=vt/2,v为波的传播速度。
6、磁翻板法、振动法、核辐射法、光纤传感器法
磁翻板法原理如图6—
 振动法的原理如图6—2所示[9]。振动液位仪由导轨、测试架、激锤、振动传感器、伺服机构等组成。伺服机构控制振锤上下爬动并激振,激振后的自由振动被振动传感器检测,该检测信号经FET变换后得到最大功率处的频率,最后由空罐时固有频率/液位关系得到液位。这种液位测量方法需要激锤、伺服机构等机械运动部件,其工作寿命不是很长,须定期维修和重新标定,安装也较复杂。
振动法的原理如图6—2所示[9]。振动液位仪由导轨、测试架、激锤、振动传感器、伺服机构等组成。伺服机构控制振锤上下爬动并激振,激振后的自由振动被振动传感器检测,该检测信号经FET变换后得到最大功率处的频率,最后由空罐时固有频率/液位关系得到液位。这种液位测量方法需要激锤、伺服机构等机械运动部件,其工作寿命不是很长,须定期维修和重新标定,安装也较复杂。辐射法:放射性同位素在衰变过程中会辐射射线,常见的射线有α、β、γ射线。其中,γ射线的穿透力强,射程远,故在核辐射液位测量中广泛采用。实验证明,穿过物质前后γ射线强度会发生变化,并满足以下关系[5]
 上式中:J0-穿过物质前的强度;J-穿透物质后的强度;μ-物质对γ射线的衰减特性;d-物质的厚度。核辐射式液位仪由放射源、探测器及处理电路组成。放射源大都采用钴-60或铯-137。探测器有电离室、记数管、闪烁计数器等几种,其作用是探测射线穿透物质后的强度。核辐射液位仪采用非接触式安装,如图6—3所示。图6—
上式中:J0-穿过物质前的强度;J-穿透物质后的强度;μ-物质对γ射线的衰减特性;d-物质的厚度。核辐射式液位仪由放射源、探测器及处理电路组成。放射源大都采用钴-60或铯-137。探测器有电离室、记数管、闪烁计数器等几种,其作用是探测射线穿透物质后的强度。核辐射液位仪采用非接触式安装,如图6—3所示。图6—
 光纤传感法:文献[11]提出了一种光纤液位传感器,当液位变化时,压力传感器的敏感弹性膜片产生位移,带动反光膜移动,使探头感受的光强发生变化,从而计算出液位。文献[12]提出了又一种光纤液位传感器,根据探头在气相和液相介质中感受到光强的差异,判断探头的位置,并控制探头跟踪液位的变化,从而得到液位数值。
光纤传感法:文献[11]提出了一种光纤液位传感器,当液位变化时,压力传感器的敏感弹性膜片产生位移,带动反光膜移动,使探头感受的光强发生变化,从而计算出液位。文献[12]提出了又一种光纤液位传感器,根据探头在气相和液相介质中感受到光强的差异,判断探头的位置,并控制探头跟踪液位的变化,从而得到液位数值。
7、结束语
该文对20余种液位测量方法进行了分析比较。在实际应用中,应根据价格、测量精度、被测介质的特点等因素,合理选择液位仪的种类。


