



人从外界获取信息必须借助于感觉器官,但机器人没有感觉器官,只能依赖传感器了。机器人的终极目标与人无限接近,那到底要装多少传感器,机器人才能更像人一点呢?


机器人的视觉、力觉、触觉早已进入实用阶段,而且他的感官,如听觉、嗅觉、味觉、滑觉等还等待攻克——研究出对应的传感器。
机器人获取外界信息、解析周边环境并作出相应反应的“五官”,正是传感器。
用专业的术语来解释,传感器其实就是一种检测装置,感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。
通俗来说,大致分为几步:“感应”信息,“收集”信息,然后“做出”反应。

只有五官远远不够,机器人有这么多传感器
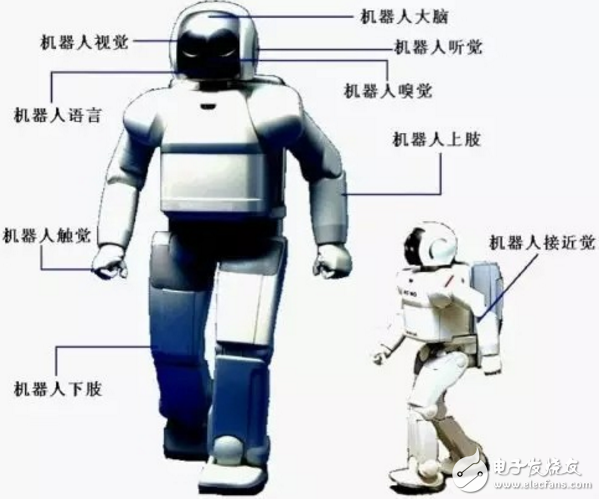
最受关注的人类5大感觉器官,如果用传感器相比拟的话,可以简单做一些归类:
视觉——光敏传感器;
听觉——声敏传感器;
嗅觉——气敏传感器;
味觉——化学传感器;
触觉——压敏、温敏、流体传感器。
然而,机器人只有五官远远不够,一般可以这样说,感官越丰富的机器人,其内部就会有越多的传感器。换句话说,如果你的机器人并不是那么灵敏,也许就是因为少了传感器。
那么,机器人到底应该有多少传感器,才能了真正做到灵敏如人类呢?
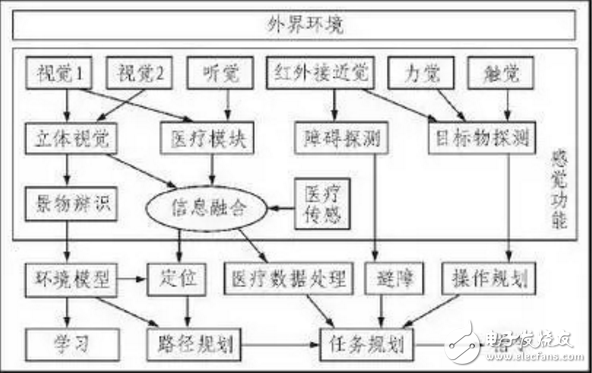
按照传感器的用武之地,即检测对象,可以简单将传感器简单分为内外两部分。
内部传感器,又称为体内传感器,主要用于检测机器人各内部系统的状况,如各关节的位置、速度、加速度温度、电机速度、电机载荷、电池电压等,并将所测得的信息作为反馈信息送至控制器,形成闭环控制。
外部传感器,又称为外界传感器,用于获取有关机器人的作业对象及外界环境等方面的信息,是机器人与周围交互工作的信息通道,是用来执行视觉、接近觉、嗅觉、听觉等传感器,比如距离测量、声音、光线等。
根据运行方式,传感器也可以分为被动式传感器和主动式传感器。被动式传感器是指本身不发出能量,靠捕获外界光线来获得信息的传感器,如CCD;主动式传感器就是那些有自主性的传感器了,它们能发出探测信号,如红外等。
这些分类方式除了能把机器人里一堆传感器做有效分类,更重要的原因是,能根据机器人哪里“不适”而倒推找到出问题的环节,就跟根据病症找原因是一个道理。
哪儿出了问题?传感器是个很好的线索
在做一个机器人之前,首先一定要了解自己手中都有哪些素材,而这些材料又起什么作用。诚如舵机起马达的作用,那么,传感器就起检测的作用,一般可以从几个指标来检验:
动态范围:是指传感器能检测的范围。比如电流传感器能够测量1mA-20A的电流,那么这个传感器的测量范围就是10log(20/0.001)=43dB.如果传感器的输入超出了传感器的测量范围,那么传感器就不会显示正确的测量值了。比如超声波传感器对近距离的物体无法测量。
分辨率:分辨率是指传感器能测量的最小差异。比如电流传感器,它的分辨率可能是5mA,也就是说小于5mA的电流差异,它没法检测出。当然越高分辨率的传感器价格就越贵。
线性度:这是一个非常重要的指标来衡量传感器输入和输出的关系。
频率:是指传感器的采样速度。比如一个超声波传感器的采样速度为20HZ,也就是说每秒钟能扫描20次。
也就是说,假如你的机器人出现了听不见的问题,那么你可以找到声敏传感器,然后从动态范围、分辨率、线性度和频率一一检测到底是哪里出了问题。
有限的内部空间和越来越多的传感器之间的矛盾
换一个角度,传感器其实也相当于人类的神经末梢,所以可知,灵敏度与分布的密度有极大的关系。的确如此,因为对灵敏度的高要求,服务机器人必须携带更多的传感器,所以,就牵涉出了未来的重要设计趋势以及重大难题:
机器人有限的内部空间和人类对机器人无限感官的期待之间的矛盾。就像人民群众日益增长的物质文化需求同落后的社会生产之间的矛盾一样,人类对于机器人的灵敏度要求就像人民的物质文化需求一样日益增长,但是机器人的内部空间又极为有限。
曾经采访一个扫地机器人设计师时,他重点提到了扫地机器人的内部空间的留白问题,除了不美观显得技术LOW以外,更重要的原因是,必须把有限的空间用在刀刃上,一毫米都不能浪费。
这个世界难题也困扰了世界很多设计师。除了把传感器做得更薄,他们也正在往“一个传感器多个功能”的方向努力!


