



磁致伸缩位移传感器,通过内部非接触式的测控技术精确地检测活动磁环的绝对位置来测量被检测产品的实际位移值的;该传感器的高精度和高可靠性已被广泛应用于成千上万的实际案例中。


由于作为确定位置的活动磁环和敏感元件并无直接接触,因此传感器可应用在极恶劣的工业环境中,不易受油渍、溶液、尘埃或其它污染的影响。此外,传感器采用了高科技材料和先进的电子处理技术,因而它能应用在高温、高压和高振荡的环境中。传感器输出信号为绝对位移值,即使电源中断、重接,数据也不会丢失,更无须重新归零。由于敏感元件是非接触的,就算不断重复检测,也不会对传感器造成任何磨损,可以大大地提高检测的可靠性和使用寿命。
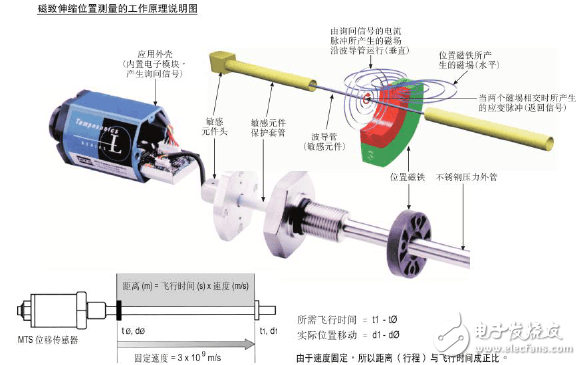
磁致伸缩位移传感器工作原理
磁致伸缩位移(液位)传感器,利用磁致伸缩原理、通过两个不同磁场相交产生一个应变脉冲信号来准确地测量位置的。测量元件是一根波导管,波导管内的敏感元件由特殊的磁致伸缩材料制成的。
测量过程是由传感器的电子室内产生电流脉冲,电流脉冲(也称“询问信号”)沿着传感器内以磁致伸缩材料制造的波导管以声音的速度运行,从而在波导管外产生一个圆周磁场,波导管发生磁致伸缩现象(铁磁性物质在外磁场作用下,其尺寸伸长或缩短,去掉外磁场后,其又恢复原来的长度),产生一个应变脉冲。应变脉冲(也称“返回信号”)很快便被电子头的感测电路探测到。
由于这个应变机械波脉冲信号在波导管内的传输时间和活动磁环与电子室之间的距离成正比,通过测量时间,就可以高度精确地确定这个距离。由于输出信号是一个真正的绝对值,而不是比例的或放大处理的信号,所以不存在信号漂移或变值的情况,更无需定期重标。
测量时,电子仓中的激励模块在敏感检测元件(磁致伸缩波导丝)两端施加一查询脉冲,该脉冲以光速在波导丝周围形成周向安培环形磁场,该环形磁场与游标磁环的偏置永磁磁场发生耦合作用时,会在波导丝的表面形成魏德曼效应扭转应力波,扭转波以声速由产生点向波导丝的两端传播,传向末端的扭转波被阻尼器件吸收,传向激励端的信号则被检波装置接收,电子仓中的控制模块计算出查询脉冲与接收信号间的时间差,再乘以扭转应力波在波导材料中的传播速度(约2830m/s),即可计算出扭转波发生位置与测量基准点间的距离,也即游标磁环在该瞬时相对于测量基准点间的绝对距离,从而实现对游标磁环位置的实时精确测量。
从产生询问信号的一刻到返回信号被探测到所需的时间周期乘以固定的声音速度,我们便能准确的计算出磁铁的位置变动。这个过程是连续不断的,所以每当活动磁铁被带动时,新的位置很快就会被感测出来。由于输出信号是一个真正的绝对值,而不是比例的或需要再放大处理的信号,所以不存在信号漂移或变值得情况,更不必像其他位移传感器一样需要定期重标。


