



By: Min Su You, Sr. Marketing Manager, Advanced Solutions Group, onsemi
作者:安森美模拟与混合信号事业部,资深市场营销经理Min Su You
As vehicles become more sophisticated, helping to enhance road safety, provide driver assistance and increase efficiency, the importance of the underlying technology increases. Whether we are talking about traditional internal combustion engine (ICE) powered vehicles, hybrids or fully electric cars, automotive designs contain dozens of sensors, microcontrollers, and actuators, all of which generate or consume vast quantities of data.
随着车辆愈发先进,有助于提升道路安全性能、提供驾驶辅助功能以及提高能效,其底层技术的重要性也随之增加。无论是传统的内燃机(ICE)驱动车辆、混合动力汽车还是纯电动汽车,汽车设计中都包含了数十种传感器、微控制器及执行器,所有这些器件都会产生或处理大量的数据。
Modern vehicles are not just transportation solutions, but rather, they are advanced computing platforms on wheels. Similar to all computing systems, the ability to transfer data effectively is essential for these systems to operate smoothly and safely.
现代车辆不仅仅是一种交通工具,更是车轮上的先进计算平台。与所有计算系统一样,有效传输数据的能力对于这类系统的平稳运行和安全操作至关重要。
Common In-Vehicle Networking (IVN) Technologies
常用车载网络技术(IVN)
Electronics have been utilized within vehicles for decades, providing useful functionality – often to enhance safety or entertainment. In the early days, many of these features were stand-alone, neither providing data to nor relying on data from, other vehicle systems. However, as technology has progressed, the benefits of integration have been realized and automotive-specific networking technologies have emerged.
电子技术在车辆中已应用数十年,提供了许多实用功能,通常是为了增强安全性或娱乐性。在早期,这些功能很多都是独立存在的,既不向车辆的其他系统提供数据,也不依赖于其他系统产生的数据。然而,随着技术的进步,集成化带来的优势逐渐显现,汽车专用的网络技术随之应运而生。
Common protocols used in vehicles include Local Interconnect Network (LIN), Controller Area Network (CAN/CAN-FD), FlexRay and Media Oriented System Transport (MOST). However, each solution is unique and brings distinct design considerations and, more importantly, limitations that are now failing to meet the demands of modern vehicles.
在车辆中普遍采用的协议包括LIN总线(Local Interconnect Network, LIN)、CAN总线(Controller Area Network, CAN/CAN-FD)、FlexRay总线以及MOST总线(Media Oriented System Transport, MOST)。虽然每种解决方案都有其独特之处,并可满足不同的设计考量,但更重要的是,这些现有的技术方案难以满足现代车辆日益增长的需求。
LIN is a cost-effective technology and is simple to implement for low data rate (< 20 kbps) applications. However, the constrained bandwidth and the fact that it is restricted to 12 nodes limit its value in modern vehicles.
LIN总线是一项成本效益高的技术,对于低数据速率(<20kbps)的应用场景来说易于实施和部署。然而,由于其带宽有限,并且系统节点数量被限制在12个以内,这限制了它在现代车辆中的价值。
CAN (and later iterations such as CAN-FD) has been used extensively in automotive and other safety-critical systems as it is highly robust and relatively unaffected by electrical interference and noise. However, the limited bandwidth (typically around 2Mbps) restricts use in certain data-intensive applications, such as infotainment and cameras, as well as limiting the number of nodes. A new CAN-XL standard is currently under development to handle higher speeds with Ethernet funneling capability, although for many engineers the direct transition to full Ethernet looks a more appealing solution.
CAN总线(以及后续迭代版本如CAN-FD)因其非常稳定可靠且相对不受电气干扰和噪声影响,在车辆和其他安全关键系统中得到了广泛应用。然而,有限的带宽(通常约为2Mbps)限制了它在某些数据密集型应用(如信息娱乐系统和摄像头)中的使用,同时也限制了节点的数量。目前,新的CAN-XL标准正在开发中,以处理更高速度并具备与以太网衔接的能力,但对于许多工程师来说,直接过渡到全以太网解决方案看起来更具吸引力。
FlexRay offers precise timing and synchronization, making it suited to time-critical uses like drive-by-wire. However, its complexity compared to other options has limited its popularity.
FlexRay总线提供了精确的时序和同步功能,使其适用于诸如线控驱动等时间关键型应用。然而,与其他方式相比,复杂性限制了其普及程度。
MOST was solely used for infotainment, but its limited applicability and high cost have led to it being replaced by other solutions as the technology is phased out.
MOST总线 仅用于信息娱乐系统,其适用性有限且成本高昂,因此随着该技术的逐步淘汰,已被其他解决方案所取代。
Ethernet is seen by many as being a successor for many of these solutions, providing high-bandwidth and low-latency communication, but there is one issue with existing protocols. The inherent carrier sense multiple access with collision detection (CSMA/CD) functionality of standard Ethernet means that deterministic operation is not possible, making it unsuitable for any time-sensitive use cases, such as drive-by-wire, with the cost of the technology also being an issue. However, recognizing the potential of Ethernet, deterministic protocols such as 10BASE-T1S which include physical layer collision avoidance (PLCA) (Figure 1) now offer the performance needed for time-critical applications. Furthermore, the cost of automotive Ethernet equipment is rapidly falling, allowing more automakers to access the high bandwidth attributes.
以太网被许多人视为替代现有多种解决方案的理想选择,它可以提供高带宽和低延迟的通信能力。然而,现行的以太网协议存在一个问题,即其固有的载波侦听多路访问/冲突检测(Carrier Sense Multiple Access with Collision Detection, CSMA/CD)机制,这意味着无法实现确定性操作,从而不适用于任何时间敏感的应用场景,比如线控驱动等。此外,以太网技术的成本也是一个问题。然而,考虑到以太网的巨大潜力,现在已经出现了如10BASE-T1S这样的确定性协议,它包含了物理层冲突避免(Physical Layer Collision Avoidance, PLCA)机制(参见图1),为时间关键型应用提供了所需的性能。此外,汽车以太网设备的成本正在迅速下降,这使得更多的汽车制造商能够应用高带宽特性。

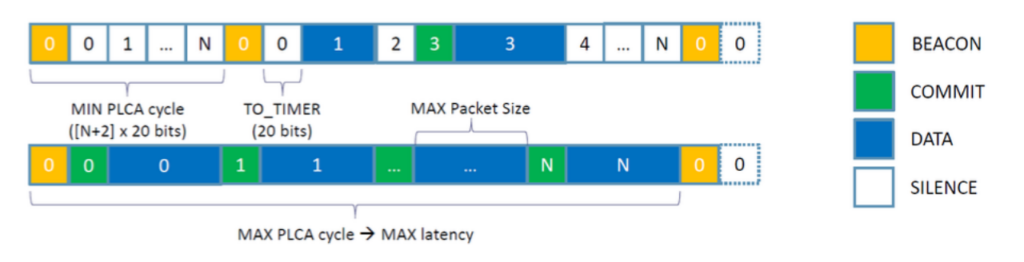
Figure 1: In a PLCA cycle, the 'Master' starts communication via a 'BEACON' before each 'Slave' send data, avoiding the collisions and associated retransmission overhead
图1:在PLCA周期中,每个“从设备”发送数据之前,“主设备”会通过一个“BEACON”信号开始通信,从而避免冲突和相关的重传开销。
Ethernet is constantly evolving to cater to the growing bandwidth demands of modern vehicles, with advancement driven by organizations like the OPEN Alliance. New standards, such as IEEE P802.3dh offer the promise of optical fiber in future vehicles, supporting incredibly demanding technologies such as low-latency 4K video and augmented reality.
以太网在 OPEN 联盟等组织的推动下不断发展,以满足现代汽车日益增长的带宽需求。新标准(如 IEEE P802.3dh)使未来车辆中的光纤应用成为可能,用以支持低延迟 4K 视频和增强现实等要求极苛刻的技术。
Wireless protocols, including Bluetooth®, Wi-Fi and cellular are often used for drivers and passengers to connect their mobile devices. The main demand for wireless communication is fueled by their ability to fulfill certain functions where a wired connection is not possible, such as tire pressure monitoring (TPMS) and keyless entry, to name just two. However, with the expansion of vehicle-to-everything (V2X) allowing vehicles to communicate with other vehicles and their surroundings, the demand for wireless communication is further increasing, but with this comes the need for enhanced security.
包括蓝牙®、Wi-Fi 和移动通信在内的无线协议通常用于驾驶员和乘客连接他们的移动设备。无线通信的主要需求源于其能够在有线连接无法实现的情况下完成某些功能,例如胎压监测(TPMS)和无钥匙进入(仅举两例)。然而,随着 "车联网"(V2X)技术的发展,车辆可以与其他车辆及其周围环境进行通信,对无线通信的需求也进一步增加,但随之而来的是对更高安全性的需求。
Vehicle Architectures
车辆架构
With the existence of numerous sub-systems and sensors located all over a vehicle, auto manufacturers must carefully choose the vehicle's architecture. Primarily, there are two options – domain or zonal. Existing domain-based architectures group items that have similar functionality (e.g., drivetrain, chassis and comfort) together – although their locations may be distributed widely around the vehicle, requiring more cabling that adds weight and cost.
由于车辆内部遍布着众多子系统和传感器,汽车制造商必须谨慎选择车辆架构。主要有两种选择——域(domain)架构或区域控制(zonal)架构。现有的基于域的架构将具有相似功能的部分(例如,传动系统、底盘和舒适性)组合在一起——尽管它们的位置可能分散在车辆的各个部位,这需要更多的布线,也增加了重量和成本。
To avoid this issue, many automakers are now preferring a zonal approach where, despite dissimilar functionality, sub-systems that are in close proximity are grouped. Zones may therefore be designated “front right,” “rear left” and so on. Although it reduces the need for cabling, it also places a greater amount of data on the vehicle's communication “backbone” between zones, thereby necessitating increased performance/bandwidth from the IVN.
为了避免这一问题,许多汽车制造商现在更倾向于采用区域控制架构的方法,即尽管功能不同,但仍将位置相近的子系统分组。因此,可以指定“右前”、“左后”等区域。虽然这种方法减少了布线需求,但也会在各区之间的车辆通信 "主干 "上增加数据量,因此要求车载网络具有更高的性能和带宽。
Typically, each zone is highly integrated with dedicated computing resources that connect to the primary CPU via a high-speed (and deterministic) communication backbone to support real-time applications, such as advanced driver-assistance systems (ADAS) and drive-by-wire. The adoption of zonal architecture provides increased flexibility for the integration, removal, or upgrading of vehicle functions and features. It is easy to scale and adapt to changing requirements.
通常情况下,每个分区都高度集成了专用计算资源,通过高速(和确定性)通信主干网与主 CPU 连接,以支持先进驾驶辅助系统 (ADAS) 和线控驱动等实时应用。采用区域控制架构使车辆功能和特性的集成、移除或升级提供了更大的灵活性。它易于扩展并适应不断变化的需求。
While zonal architecture has the potential to offer numerous benefits, its implementation can lead to an increased performance demand on the in-vehicle networks. This is primarily due to the need for higher data traffic, low latency, redundancy, scalability support, and improved security and diagnostic features.
虽然区域控制架构有可能带来诸多好处,但其实施也会导致对车载网络性能需求的增加。这主要是由于需要更高的数据流量、低延迟、冗余、可扩展性支持以及更好的安全性和诊断功能。
Functional Safety
功能安全
As vehicles become more autonomous, the need for functional safety increases with a greater demand for elevated redundancy measures. More systems are now requiring higher ISO26262 automotive safety integrity levels (ASIL) ratings, moving from A and B to the stringent C and D rated components as drivers become more reliant on decisions made and actions taken by the vehicle itself. Functional safety encompasses all aspects of the design from concept right through to eventual decommissioning of the vehicle.
随着车辆的自动化程度越来越高,对功能安全和冗余措施的需求也在增强。越来越多的系统要求符合更高的ISO26262汽车安全完整性等级(ASIL),随着驾驶员越来越依赖车辆自身做出的决策和采取的行动,安全等级要求正从A级和B级向更为严格的C级和D级组件过渡。功能安全涵盖了从概念设计到车辆最终退役的所有设计环节。
Undoubtedly, there is a significant influence on the overall vehicle architecture and, therefore, the IVN. For high-performance ADAS functions such as automatic emergency braking and adaptive cruise control, low-latency data transport is essential. The deployment of redundancy across both sensors and communication paths, as well as sophisticated fault-tolerant mechanisms, are necessary to achieve functional safety compliance.
毫无疑问,这对整个车辆结构以及车载网络都有着重大影响。对于自动紧急制动和自适应巡航等高性能 ADAS 功能而言,低延迟数据传输至关重要。要实现功能安全合规性,就必须在传感器和通信路径上部署冗余以及精密的容错机制。
While time-sensitive networking (TSN) is required for safety-critical functions in all vehicles, the move to zonal architectures enhances this need. The precise alignment of timing and compensation for latency are crucial to ensure the correct operation of an ADAS function, especially when elements, such as image sensors, LiDAR modules and control electronics, are distributed across different zones of a vehicle. Even for applications such as noise canceling with microphones in different zones will require TSN to work effectively. For Ethernet solutions, there are existing TSN Ethernet protocols that can be reused for automotive purposes.
虽然所有车辆的安全关键功能都需要时间敏感型网络(TSN),但向区域控制架构的转变增强了这种需求。时序的精确调整和延迟补偿对于确保 ADAS 功能的正确运行至关重要,尤其是当图像传感器、激光雷达模块和电子控制系统等元件分布在车辆的不同区域时。即使是在不同区域使用麦克风进行降噪等应用,也需要 TSN 才能有效工作。在以太网解决方案方面,现有的 TSN 以太网协议可重新用于汽车用途。
For image sensors and cameras interfaces, MIPI CSI-2 (camera serial interface) and DSI-2 (display serial interface) support high-speed data, making them ideal for transferring large amounts of data within camera systems, displays and infotainment systems. But further developments are also underway here, with a standardized SerDes solution being developed by the MIPI Alliance and Automotive Serdes Alliance (ASA). Eventually, ASA Motion Link (ASA ML) will be approved for native integration with MIPI CSI-2. Within this collaboration, there is also research into enhanced security for MIPI protocols and asymmetrical Ethernet for cameras (high-bandwidth transmit, low-bandwidth receive).
在图像传感器和摄像头接口方面,MIPI CSI-2(摄像头串行接口)和 DSI-2(显示串行接口)支持高速数据传输,是摄像头系统、显示屏和信息娱乐系统之间传输大量数据的理想选择。移动产业处理器接口联盟(Mobile Industry Processor Interface,MIPI)和汽车串行/解串通信技术联盟(Automotive Serdes Alliance,ASA)正在进一步开发一种标准化的 串行/解串(SerDes)解决方案。最终,ASA 运动连接技术(ASA ML)将获准与 MIPI CSI-2 集成。在这一合作中,还对增强 MIPI 协议的安全性和用于摄像头的非对称以太网(高带宽传输,低带宽接收)进行了研究。
onsemi's Role Within IVN
安森美(onsemi)在车载网络(IVN)中的角色
onsemi has over three decades of involvement in the IVN arena, providing innovative products and best-in-class application support. Currently, the solution portfolio is based around many of the existing IVN technologies, including LIN, CAN and FlexRay. In the next few years, enhanced versions of products for LIN and CAN will be released, while the expected demise of FlexRay means little, if any, investment in this protocol.
安森美在车载网络领域拥有超过三十年的丰富经验,提供创新产品和一流的应用支持。目前,解决方案组合以许多现有的车载网络技术为基础,包括LIN、CAN和FlexRay。未来几年,将陆续发布LIN和CAN产品的增强版本,由于对FlexRay的发展预期不乐观,所以对该协议的投资即使有,也不会太多。
Clearly, 10BASE-T1S Ethernet will be an area of significant focus for the automotive sector. With its first products already launched, onsemi is presently working on its second-generation product portfolio for this vital protocol. With the expected adoption by most automakers of the zonal architecture, 10BASE-T1S will be a fundamental part of automotive communication going forward. This is especially true for applications requiring high throughput, bandwidth and security, such as ADAS functions, including fully autonomous driving.
显然,10BASE-T1S 以太网将是汽车行业的一个重点领域。安森美已经推出了首批产品,目前正在为这一重要协议开发第二代产品组合。随着大多数汽车制造商预计采用区域控制架构,10BASE-T1S 将成为未来汽车通信的基本组成部分。对于要求高吞吐量、高带宽和高安全性的应用(如 ADAS 功能,包括完全自动驾驶)来说,尤其如此。
Despite the obvious benefits of Ethernet within a vehicle, established protocols (such as LIN and CAN) will continue to be used within zones where speed is not critical (window opening, folding mirrors, seat positioning, etc.). However, we are already seeing Ethernet taking over some of CAN's market share and expect that Ethernet will become the preferred technology for low-latency and high-bandwidth communications by next year.
尽管以太网在车辆应用中具有明显的优势,但在对通信速率要求不高的场景(如车窗开启、后视镜折叠、调整座椅等)仍将继续使用现有协议(如 LIN 和 CAN)。不过,我们已经看到以太网正在取代 CAN 的部分市场份额,预计到明年,以太网将成为低延迟和高带宽通信的首选技术。
Summary
总结
These days, vehicle performance is much less about how fast it will move and more about how fast the IVN can move data around in what is essentially a “computing platform on wheels.”
如今,车辆性能已不再取决于其行驶速度,而更多地取决于车载网络在 "车轮上的计算平台 "中数据传输的速度。
While legacy protocols such as LIN and CAN will continue to have a limited role, some, such as MOST and FlexRay will disappear. Zonal architecture will become preferred as it reduces the cost and weight of cabling but requires the implementation of TSN and far greater bandwidth, especially on the backbone between zones.
虽然 LIN 和 CAN 等传统协议将继续发挥有限的作用,但 MOST 和 FlexRay 等一些协议将逐步淘汰。由于区域控制架构降低了布线的成本和重量,将成为首选,但还需要应用 TSN 和更大的带宽,特别是在区域之间的主干网上。
Deterministic Ethernet (10BASE-T1S) will play a significant role, becoming the default “go-to” technology for many automakers in the very near future. The greater use of this technology will drive increased standardization within IVN and enable the innovative solutions needed to deliver full autonomy. In addition, the push for increased vehicle safety and advanced autonomous driving systems is currently only feasible with Ethernet solutions.
确定性以太网(10BASE-T1S)将发挥重要作用,在不久的将来成为许多汽车制造商默认的 "首选 "技术。该技术的广泛应用将推动车载网络标准化程度的提高,实现全自动驾驶所需的创新解决方案也成为可能。此外,目前只有以太网解决方案才能推进提高车辆安全性和先进自动驾驶系统的实现。
onsemi has played a significant role in automotive technology for several decades – in particular in IVN. While advances will continue in LIN and CAN devices, onsemi's primary focus is now to develop further 10BASE-T1S Ethernet solutions that provide the automotive sector with the high-performance components they need to meet the next generation of automotive applications.
几十年来,安森美一直在汽车技术领域发挥着重要作用,尤其是在车载网络方面。虽然 LIN 和 CAN 在器件方面将继续取得进展,但安森美目前的主要重点是开发更丰富的 10BASE-T1S 以太网解决方案,为汽车行业提供满足下一代汽车应用所需的高性能元器件。


