



众所周知,激光制导武器是以敏感到的特定激光信号为制导信息。在激光制导武器的半实物仿真系统中,目标仿真和制导仿真具有同等重要的地位。这是因为激光目标模拟的准确性影响到系统的整体仿真精度和可靠性,甚至可以说目标仿真系统的研制水平决定仿真大系统水平[1]。因此,目标仿真是提高半实物仿真系统整体精度的关键,“如何逼真地模拟激光目标”就成为仿真中重要的问题[1]。
目标仿真系统研究的是能够实时精确的模拟战场环境中导引头入瞳处接收到的各种目标反射编码激光的光学特性。具体来说就是在计算机和电机控制器的控制下实时控制激光能量和光斑大小的变化,并以此来模拟激光航弹导引头入瞳处的激光目标特性、能量变化特性和光斑大小变化特性。这种精确的模拟要求对目标的位置信息和速度信息等进行实时采集处理。之前基于步进电机伺服驱动系统的程控一体化激光器不能很好的满足系统的实时性要求,因此,笔者设计了基于伺服电机及运动控制卡的运动控制系统。该系统在控制激光光斑大小和能量的实时变化方面较前一系统有了较大改进。
运动控制的实时性设计
对激光光斑的大小和能量的实时性控制,具体体现就是对程控一体化激光器中的可变衰减系统和可控扩束系统进行实时性设计,这是目标仿真系统设计的一个关键。在设计时,我们以某型激光制导武器为背景进行了数字仿真,得到一组典型的数字仿真能量衰减(对应的为电机控制步数数据)曲线如图1~2所示。


由上述数据和图形可见,在初始投弹和飞行的大部分时间里,能量和光斑变化较缓慢,而在接近目标时发生了剧烈的变化。这说明当炸弹接近目标时激光能量和导引头所见光斑大小随时间的变化并不是一个线性关系。鉴于此,本系统在设计时既充分考虑光斑大小和能量的实时跟踪范围,又考虑了工程上实现的可能性,选用了TSA50标准型高速电控平移台。旋转台则选用中空力矩电机带动旋转棱镜来直接实现。特别的,本系统将步进电机驱动的平移台和旋转台均改为由伺服电机进行驱动,主要考虑的是伺服电机启动时间短,速度高,在极短的时间内能够带动激光器内安装的平移棱镜和旋转棱镜做高速运动,来模拟导引头近距离敏感到的光斑的大小和能量,从而能够满足对光斑实时变化的要求。由高速平移台和旋转电机分别驱动扩束系统的目镜和格兰—付克棱镜的检偏镜,使得能量和光斑变化在弹目距离>300m时能完全满足实时性控制要求。而在剩余时间内,由电机做全速运动来近似逼近末段的陡峭变化。
基于以上的目标和对于运动控制功能的设计,采用专用运动控制芯片是一种较好的选择[2]。专用控制芯片通过PCI 总线与PC 机的CPU 通讯,接收PC 机的控制指令,由内部的逻辑电路进行运算和脉冲发送,同时检测一些开关量信号(如限位信号)的状态并向PC 机报告,以实现运动控制的功能。在这种方案中,所有的运动控制细节都由运动控制卡上的专用芯片完成,无需占用PC 机的资源,PC 机可以专注于用户界面的处理和对运动控制卡状态的监控。运动控制专用芯片自身具有强大的运动控制功能,不需要扩展复杂的外围电路。PC 机只需要对运动控制芯片发送命令和参数,控制简单。经过反复的调研和论证,初步确定总体运动控制方案为“PCI 接口芯片+专用运动控制芯片+激光控制模块”。运动控制系统结构
整个控制系统硬件由PC机、DMC5400多轴控制器、增量式编码器以及松下公司的全数字式交流伺服系统(包括电机和驱动器)、中空力矩电机等组成(见图3)。
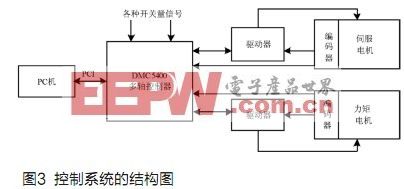
该控制系统以PC机平台为基础,DMC5400多轴运动控制器为运动控制核心。PC机的CPU与DMC5400的CPU构成上下位机的结构,两个CPU各自完成相应的任务。
PC机作为DMC5400的上位机,提供Windows平台及人机操作界面,完成系统初始化、轨迹参数的设定、运动信息的实时显示等,仅需用极少部分时间向控制卡发送运动指令。下位DMC5400多轴运动控制器主要完成平移电机和旋转电机的运动控制,包括伺服驱动、程序解释以及高速数据采集等实时性任务。DMC5400直接插在PC机的PCI插槽中,并由动态链接库驱动。
运动控制系统软件设计
该控制系统实质上是一种以DMC5400为核心组成的开放式数控系统。上位PC机和下位DMC5400多轴控制器各有自己的CPU、存储器和外设,分别构成一套独立的计算机系统。因此,在选择控制软件的开发平台时充分考虑了这种结构的特点。由于DMC5400多轴控制器采用了实时操作系统,数控程序代码解释工作和连续运动时复杂的插补运算都由其内部的DSP来完成,可以保证对运算过程和各种紧急情况的及时处理。相对而言,上位PC机只是提供与用户交互部分和一些状态变量的读取工作,CPU的工作量不是很大。
上位机软件
上位机软件的组成如图4所示。

初始化模块:实现零位标定等功能。
轨迹和参数设定模块:根据不同的运动功能和轨迹,提供了相应的参数设定界面,其中包括参数合理性判别、缺省值提供等辅助功能。
运动信息实时显示模块:通过与DMC5400实时通讯,动态采集负载位置和速度等运动信息。然后,借助CB开发的带有二维坐标系的显示界面,实现实时动态显示负载运动轨迹,同时动态显示左右两个软硬限位状态。另外,在界面的右下角还实时动态显示负载的位置和速度数据。
故障诊断模块:内嵌于各功能模块中,如设定值合理性判别、键盘操作功能保护、界面功能按钮的连锁、电机限速保护、位置超速保护等。
通讯模块:利用DMC5400提供的动态链接库编制,实现上位PC机和下位DMC5400之间的通讯。它内嵌于各功能模块中,囊括了同DMC5400通讯的所有方式,而且将其主要的函数进行分类、封装。所编制的通讯程序实现了运动轨迹程序及设定参数的下载、上位PC机对DMC5400的指令传输及DMC5400对PC机的状态反馈等通讯功能。
下位机软件
控制下位机是运动控制系统的直接控制级,构成可控扩束和可控衰减两个独立的伺服控制回路。其功能包括:实现目标运动的实时控制;采用相应的控制算法,对系统的运行位置、速度进行控制;将检测到的系统状态信号通过PCI总线传给上位机。DMC5400的运动控制功能十分丰富,可以满足绝大多数多轴运动控制系统的要求[3]。
DMC5400运动控制卡提供基于Windows 95 /98/Me/NT/2000/XP下32位DLL驱动编程。其具体的编程语言可为VB、VC、C++Builder中的任何一种。在运动函数库中所使用到的函数主要有如下几种:控制卡及轴设置函数,独立运动和插补运动函数,制动函数,位置和状态的设置及查询函数,I/O口操作函数,错误代码函数。其函数返回值为0(函数执行正确)或-1(函数执行错误)。其控制系统的流程图如图5所示。
仿真结果分析
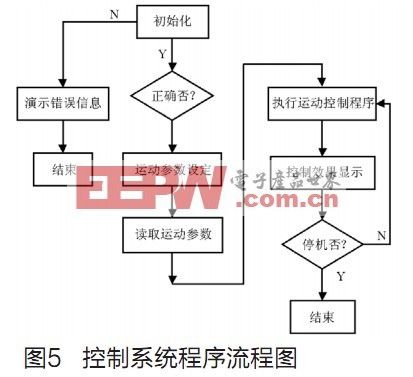
图6~11为半实物仿真试验与数学仿真试验激光制导炸弹空间三维坐标变化曲线,可见两种仿真模式下试验曲线吻合良好。由于在整个弹道曲线中差别表现不明显,因此给出了各坐标相应的弹道末端局部显示曲线。
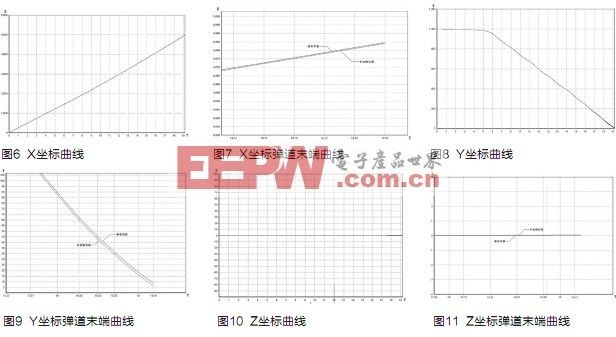
试验结果表明,数学仿真的仿真解算稳定,结果精度良好;同时,在相同投弹条件下,半实物仿真与数学仿真试验过程相关性比较好,仿真精度非常高,由此反映出目标仿真系统带入全系统的误差极小(目标系统误差占全系统误差的90%),所设计的控制系统实现了光斑大小和能量的实时控制。
技术专区
- 聚焦IoT及车载电子 理光微电子深耕中国市场
- 泰科电子(TE Connectivity)亮相2018慕尼黑上海电子展 以创新科技连动
- 雷达没那么神秘就这点事!
- 基于树莓派的多串口多总线服务器设计
- 基于AD9371的经典小尺寸卫星通信解决方案


