力觉传感器工作原理
力觉传感器根据力的检测方式不同,可分为:应变片式(检测应变或应力)、利用压电元件式(压电效应)及差动变压器、电容位移计式(用位移计测量负载产生的位移)。其中,应变片式压力传感器最普遍,商品化的力传感器大多是这一种。
压电元件很早就用在刀具的受力测量中,但它不能测量静态负载。电阻应变片式压力传感器是利用金属拉伸时电阻变大的现象,将它粘贴在加力方向上,可根据输出电压检测出电阻的变换,如图所示。电阻应变片在左、右方向上加力,用导线接到外部电路。

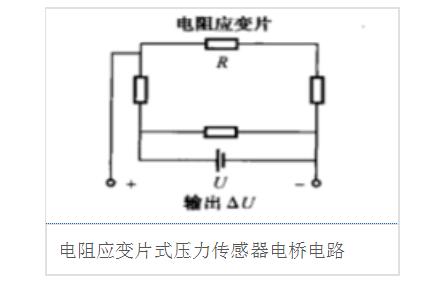
在不加力时,电桥上的电阻都是R,当加左、右方向力时,电阻应变片是一个很小的电阻ΔR,则输出电压为
ΔU = U1 - U2 =(( U/2)·(ΔR/2R))/(1+ΔR/2R)≈UΔR/4R
电阻变换为 ΔR ≈4RΔU/U
力觉传感器应用
力控制技术尚未实用化的主要原因:一是现有的机器人技术还尚未完全达到实现力控制的水平;二是力控制的理论体系尚未完善。此外,从理论上掌握机器人动作和环境的系统配置及相应的通用机器人语言还有待进一步研究。这一系列研究开发工作需要实现传感器反馈控制,具有通用硬件和软件的机器人控制系统。而现在商品化的机器人主要是以位置控制为基础的控制或示教方式。
三菱电机力觉传感器应用于机器人:
三菱电机发售了集工业用机器人、力觉传感器和专用程序设计工具为一体的“MELFA 力觉应用程序包”。据说通过利用该应用程序包,能够简单地实现电气、电子零件、汽车零件等组装、嵌套、检查工程的自动化。该应用程序包由垂直多关节机器人“RV-2F”系列、 “RV4/7F 系列”(配管内装规格品)、控制器、力觉传感器和接口装置、配线类成套的“4F-FS001-W200”和“力觉应用软件“RT Toolbox2”附加装置用工具构成。该应用程序包的目标客户包罗万象,不仅包含首次使用机器人的企业,还包括已经熟练使用机器人的系统集成公司等。
这是软件应用程序包首次搭载力觉传感器。因为该传感器能够检测机械手臂上微小的作用力,因此,以往的机械手难以进行的工件仿形、嵌套作业成为了可能。除此之外,还可以根据机器人作业的原始数据,进行品质管理及作业错误的原因分析。通过使用不仅能编辑机器人用程序,还能推测加工时间、进行支援程序漏洞修复、模拟等工程的RTToolbox2,可大幅减轻编程作业的负担。
只需要按一个按钮,就能自动设定力觉传感器的默认值。另外,还可以在专用界面上编辑使用力觉传感器的机械手臂动作的辅助程序。据了解,通过这些功能,可以使力觉动作的设备和生产线的启动时间比不使用应用程序包所需时间缩短80%。如果使用力觉应用软件,还能够使力觉动作复杂的程序设计调整作业变得简单。