红外避障传感器的工作原理
红外避障主要是以红外测距传感器为主。
红外测距都是采用三角测距的原理。红外发射器按照一定角度发射红外光束,遇到物体之后,光会反向回来,检测到反射光之后,通过结构上的几何三角关系,就可以计算出物体距离D。
当D的距离足够近的时候,上图中L值会相当大,如果超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。
当物体距离D很大时,L值就会很小,测量量精度会变差。因此,常见的红外传感器 测量距离都比较近,小于超声波,同时远距离测量也有最小距离的限制。另外,对于透明的或者近似黑体的物体,红外传感器是无法检测距离的。
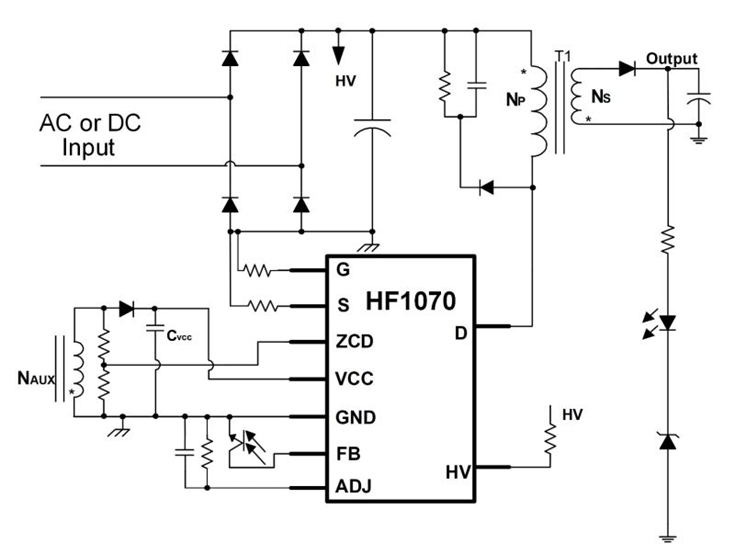
LM393红外避障传感器模块电原理图

模块描述
该传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管,发射管发射出频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距离,有效距离范围2~30cm,工作电压为3.3V-5V。该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,可以广泛应用于机器人避障、避障小车、流水线计数及黑白线循迹等众多场合。
模块参数说明
1 当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮电平,同时OUT端口持续输出低电平信号,该模块检测距离2~30cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
2、传感器主动红外线反射探测,因此目标的反射率和形状是探测距离的关键。其中黑色探测距离小,白色大;小面积物体距离小,大面积距离大。
3、传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器;连接方式:VCC-VCC;GND-GND;OUT-IO
4、比较器采用LM393,工作稳定;
5、可采用3-5V直流电源对模块进行供电。当电源接通时,红色电源指示灯点亮;
6、具有3mm的螺丝孔,便于固定、安装;
7、电路板尺寸:3.2CM*1.4CM
8、模块已经将阈值比较电压通过电位器调节好,非特殊情况,请勿随意调节电位器。
模块接口说明
1 VCC 外接3.3V-5V电压(可以直接与5v单片机和3.3v单片机相连)
2 GND 外接GND
3 OUT 小板数字量输出接口(0和1)
4.工作电流是10ma以内
如图所示壁障传感器模块:

红外传感器避障模块电路图
在智能小车制作中经常会用到红外传感器避障模,这里介绍一款智能小车制作时常用的红外传感器避障模,模块是由LM567电路组成,LM567电路是一片锁相环电路,采用8脚双列直插塑封。其⑤、⑥脚外接的电阻和电容决定了内部压控振荡器的中心频率f。
其中心频率f由R、C决定: f=1/(1.1*RC)
在电路中,因为红外发射器的起振频率是 38KHz,其中电容选择103,所以由以上公式可得 R=2.4KΩ 。
在电路中仅利用了LM567接收到相同频率的载波信号后⑧脚电压由高变低这一特性,来形成对控制对象的控制。
D1发射红外线,D2接收红外信号。LM567第⑤、⑥脚为译码中心频率设定端,一般通过调整其外接可变电阻W改变捕捉的中心频率。图中红外载波信号来自LM567的第5角,也即载波信号与捕捉中心频率一致,能够极大的提高抗干扰特性。
感器避障模块LM567的电路图,如图11,LM567的①、②脚通常分别通过一电容器接地,形成输出滤波网络和环路单级低通滤波网络。②脚所接电容决定锁相环路的捕捉带宽:电容值越大,环路带宽越窄。①脚所接电容的容量应至少是②脚电容的2倍。③脚是输入端,要求输入信号≥25mV。⑧脚是逻辑输出端,其内部是一个集电极开路的三极管,允许最大灌电流为100mA。LM567的工作电压为4.75~9V,工作频率从直流到500kHz,静态工作电流约8mA。

在选择红外发射接收电路电子小制作中,有四个方案可以选择,并且都做了PCB进行调试比较。
方案一: 利用40KHz的晶振作为红外发射器的震荡源。通过示波器观察,波形非常准确完整,由于红外接收的频率一般是38KHz,虽然晶振的频率可以通过可调电阻微调。但是还是很难匹配,每次试验时都要微调。所以不选择这个方案。
方案二: 如前所述,使用三脚的红外接收器,但是接收器自备了选频和解调能力,很难用单片机对其接收信号进行判断。所以不选择这个设计方案。
方案三:用高速CMOS型四重二输入“与非”门74HC00组成RC震荡电路作为频率发生器,波形也准确完整,但是难匹配。所以不选择这个方案。
方案四:选用通用音调译码器LM567的5输出38KHz频率,其特点是红外线发射部分不设专门的信号发生电路。8脚输入红外接收器接收到的信号。这个信号是锁相音频译码器的锁相中心频率,这样既简化了线路和调试工作,又防止了周围环境变化和元件参数变化对收发频率造成的差异,实现了红外线发射与接收工作频率的同步自动跟踪,使电路的稳定性和抗干扰能力大大加强。本设计中就是利用此方案最终实现避障功能。
这个电子小制作电路的特点是红外线发射部分不设专门的信号发生电路。而是直接从接收部分的检测电路LM567的5脚引人信号,这个信号是锁相音频译码器的锁相中心频率,这样既简化了线路和调试工作,又防止了周围环境变化和元件参数变化对收发频率造成的差异,实现了红外线发射与接收工作频率的同步自动跟踪,使电路的稳定性和抗干扰能力大大加强。
LM567的5脚输出的38KHz中心频率输出给三极管Q1,经过三极管放大,信号输出给红外发射器J2,可调电阻R3可以改变其发射功率。信号由红外接收器J3接收,经过运算放大器741的反相放大,信号输出给LM567的输入3脚,由于输入的信号是LM567的锁相中心频率,所以LM567的8脚输出由默认的高电平变为低电平。发光二极管有了电压差,所以信号指示灯亮,证明前方有障碍,同时8脚的信号输出给单片机,由单片机由电平的变化去控制电动机的工作实现避障。