一、概述
永磁同步电机(PMSM)的磁场定向控制(FOC)在近十几年成为了主流的电机控制方法。其中,无位置传感器FOC由于其低成本和高可靠性,获得了越来越多的应用和关注。由于没有位置传感器,所以必须估算转子磁链位置。由于在旋转过程中,转子磁链生成反电动势(BEMF),并且BEMF超前转子磁链π/2弧度,所以可以利用对BEMF进行观测,进而估算转子磁链。降阶隆伯格观测器(ROLO)是一种常用的BEMF观测手段。
一方面,工程师可能不具备设计观测器所需的背景知识;另一方面,产品开发项目必须尽快且高质量地完成。尽管可以找到背景知识的相关教材,但由于其缺少针对性,所以工程师不得不花费大量时间进行学习。该矛盾经常成为制约产品开发进度和质量的瓶颈。针对此困境,ROLO由于其原理简单,成为了能短时间掌握的优选方案。
本文针对PMSM控制所需,筛选出最少量的必需知识,按照逻辑顺序阐述利用ROLO观测BEMF的原理。此外,还介绍了Microchip的相关电机控制方案。读者可以借此快速掌握原理,并且上手实践和熟悉。
二、特征值与稳定性

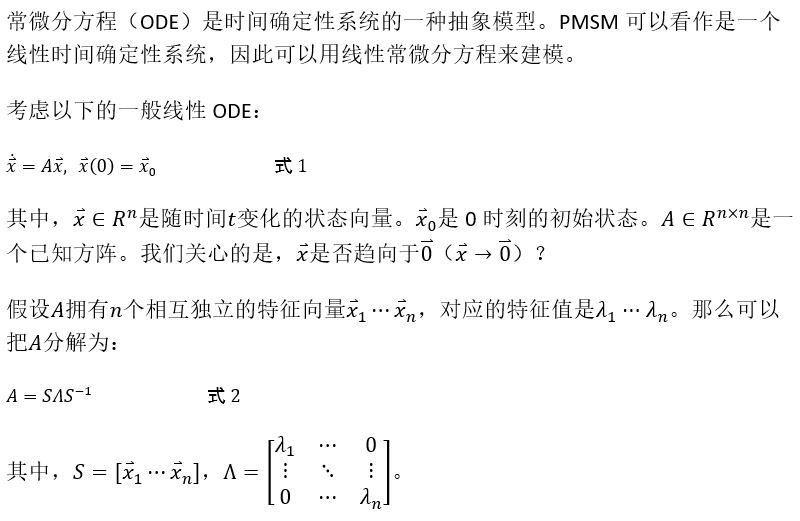
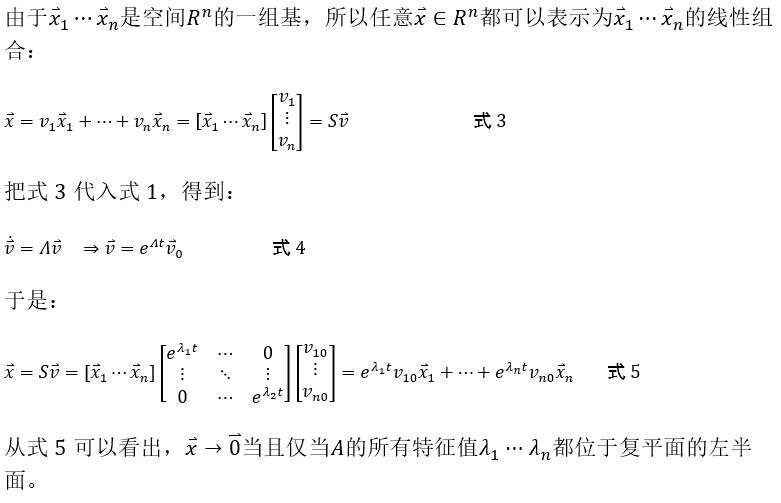
三、状态反馈控制
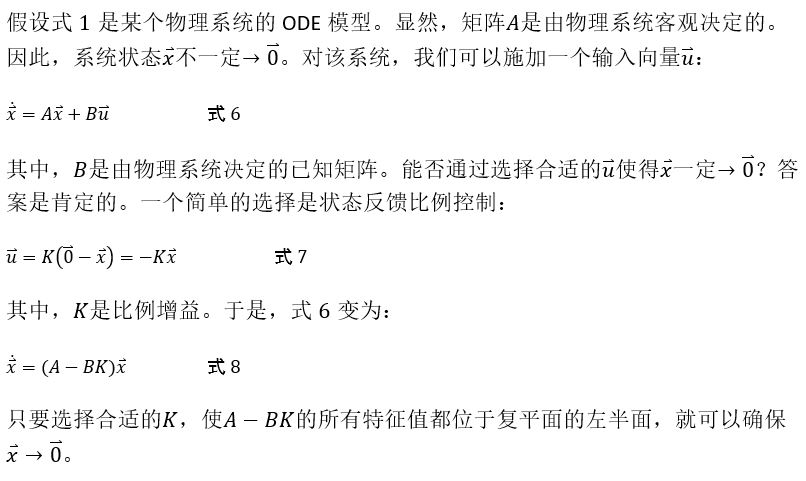
四、隆伯格观测器
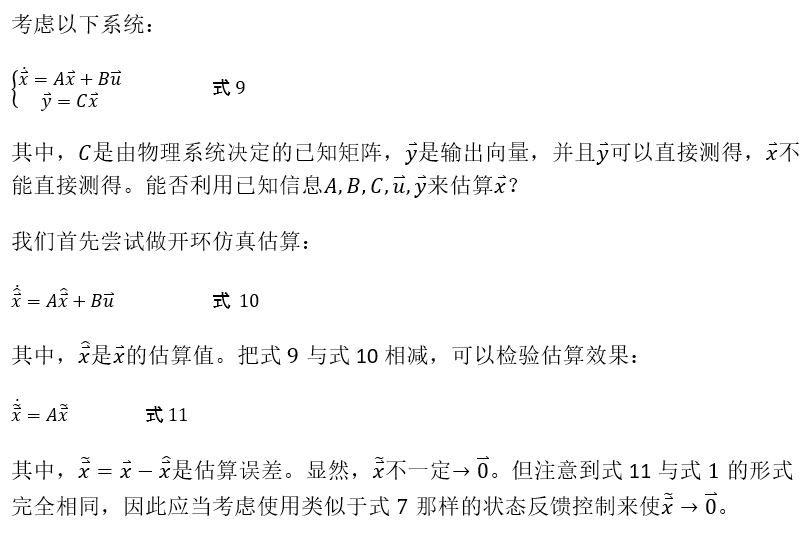
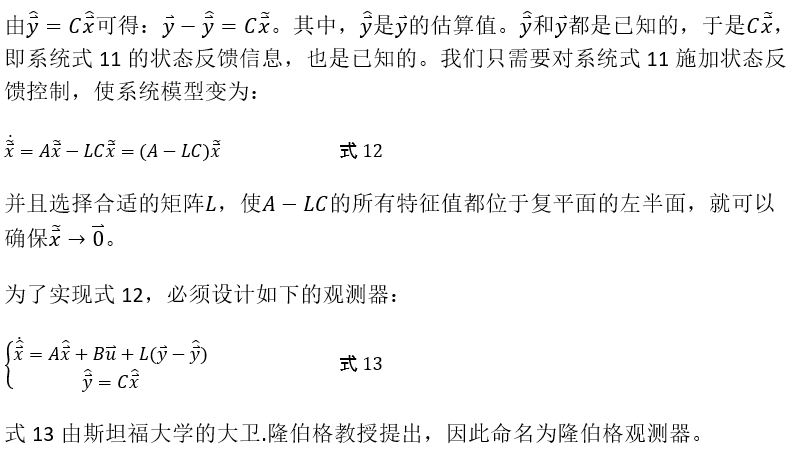
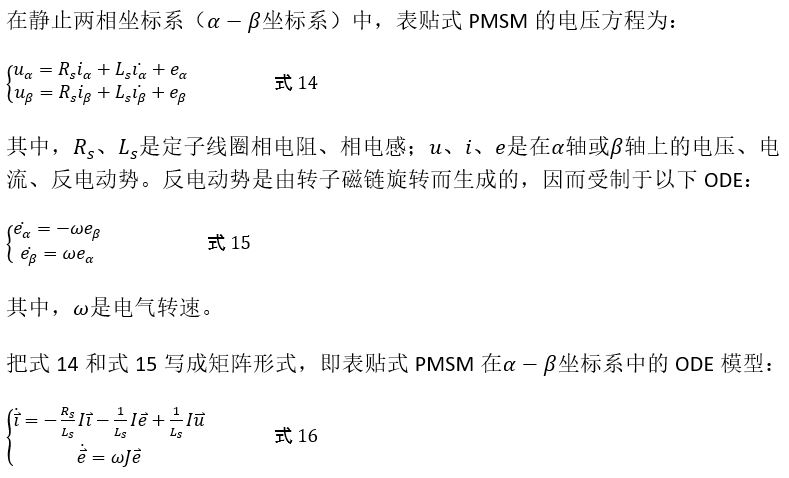
五、观测PMSM的BEMF
六、Microchip的ROLO方案
Microchip的基于ROLO的PMSM无传感器控制方案提供例程、评估套件、开发工具和帮助文档。
例程位于MPLAB Harmony 3的motor control模块中,是一个运行在Cortex-M0+MCU(SAMC21)之上的MPLAB X工程:pmsm_foc_rolo_sam_c21。
该演示方案可以运行于MCLV2低压电机控制评估套件或MCHV3高压电机控制评估套件。两款评估套件均可在Microchip官网搜索并订购。
该例程利用图形化配置工具MPLABHarmony配置器(MHC)生成。使用MPLABXIDE打开该工程,并打开MHC,就可以看到CPU和所需片上周边(PWM模块和ADC等)的配置情况,如图1所示。
相应的帮助文档也位于MPLABHarmony3的motorcontrol模块中。其中介绍了如何搭建硬件平台、编译和下载工程、算法原理框图、软件流程图、软件配置方法等,如图2、图3、图4、图5所示。

图1:例程的MHC配置。
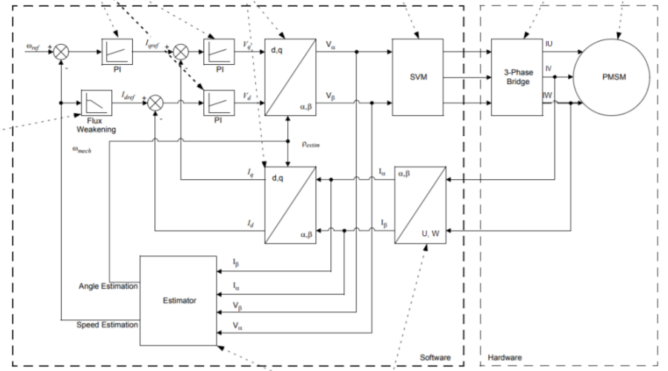
图2:电机控制算法框图。
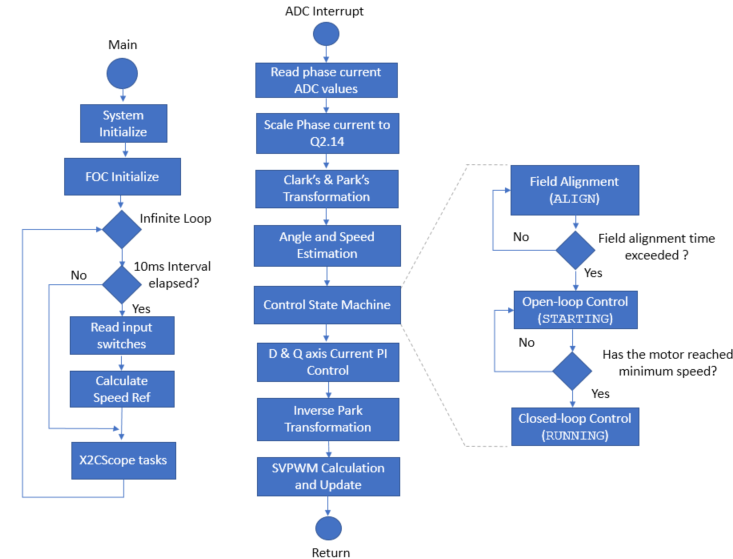
图3:软件流程图。
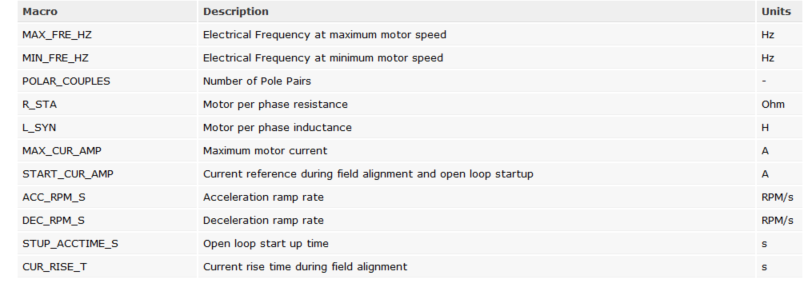
图4:软件配置方法——电机参数宏定义列表。
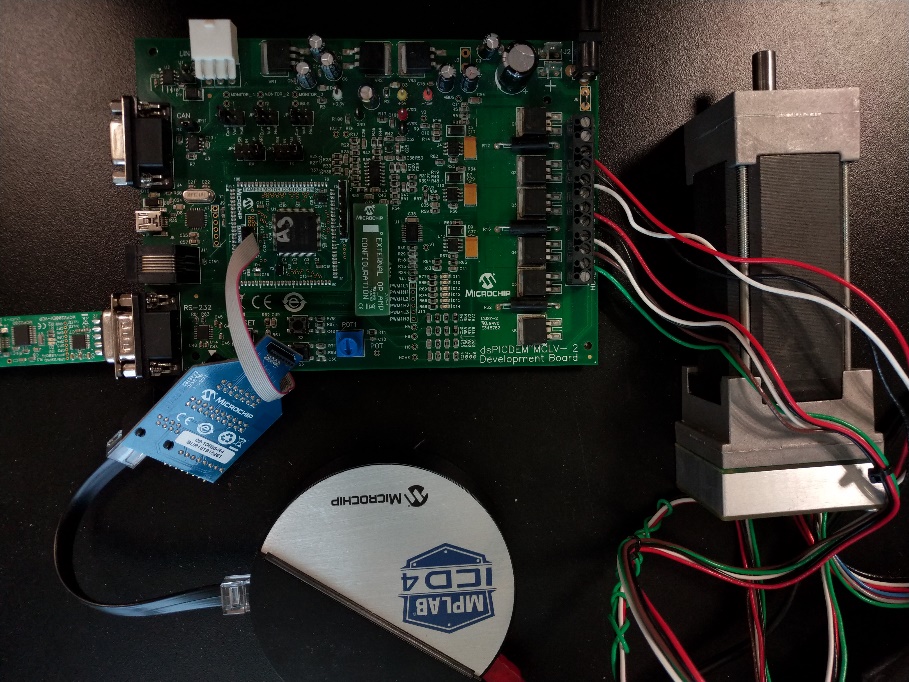
图5:低压电机控制硬件连接。
七、总结
本文从PMSM的ODE模型开始,逐步介绍了基于ROLO的BEMF观测器的设计理念和方法;并且介绍了Microchip的相关方案。读者可以利用这些资源快速掌握原理并上手实践、熟悉PMSM的无传感器控制方法,以加快项目开发进度和提升产品性能。
八、参考文献
1. AN2590, Sensorless FOC for PMSM Using Reduced Order Luenberger Observer, Microchip Technology. (https://ww1.microchip.com/downloads/en/AppNotes/00002590B.pdf)
2. MPLAB Harmony 3: motor control module. (https://gitee.com/Microchip-MPLAB-Harmony/motor_control)
3. Microchip工程师社区知识库:《Harmony 3电机控制资源初探》(http://www.microchip.com.cn/newcommunity//Uploads/H3_Chinese_guides/guide-17.pdf)