该测量仪可以完成对稳恒场,脉冲场峰值,交变场正负峰值、峰峰值及其频率的测量,同时具有自动测量功能。

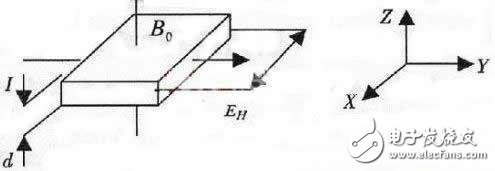
图1:霍尔效应原理图
测量原理
霍尔效应的基本原理如图1所示。在Y方向通以电流I,并在Z方向施加磁感应强度为90的磁场,那么载流子在X方向受到洛仑兹力作用而在两端产生霍尔电动势EH。根据霍尔效应制造的霍尔器件是具有一定形状的半导体薄片,其霍尔电动势为:
EH=RH(IB0/d)(1)
式中,RH为与材料有关的霍尔系数,d为霍尔器件的厚度,I为流过霍尔器件的电流,Bo为外磁场的磁感应强度。对一个霍尔器件而言,在电流I恒定的情况下,EH与外磁场Bo成正比,设比例系数K=RH。因此,对于不同的霍尔传感器,可以通过改变工作电流I,使其具有相同的比例系数。
霍尔器件的定标就是确定霍尔电动势EH与外磁场Bo的比例关系。所以在霍尔器件的线性区,可以通过改变工作电流I,使其达到预先设置的霍尔电动势EH与外磁场Bo的比例关系,从而完成线性区的定标。把对应工作电流下的非线性区霍尔电动势与外磁场Bo作成数据表格存储在一个串行的E2PROM中,测量时就可以通过查表和线性拟合的方法求得外磁场Bo。因此,只需在霍尔器件探头上封装一个串行E2PROM,将该探头的工作电流和对应的非线性区表格存储在其中即可。更换探头后磁场测量仪的CPU可以从E2OPROM中取得该探头的工作电流,然后调节一个可控的恒流源完成定标工作。
硬件设计
该仪器的硬件电路主要由主控电路、定标电路、信号处理与采集电路、频率测量电路等组成。
主控电路
主控电路以AT89C52为核心,包括一个双通道A/D转换器MAXlll、两个D/A转换器MAX541、经8279扩展的键盘显示电路、一个定标参数存储器X24128以及与上位机通讯的RS232接口。为了减少干扰,在模拟电路与数字电路之间加有光电隔离电路。
A/D转换器MAXlll的一路用来检测调零电路输出,另一路用来采集保持后的感应电压信号。两个D/A转换器MAX541中的一个用来输出霍尔不等位电势的补偿电压,另一个用来控制压控恒流源。
经8279扩展六个按键:电源键、定标键、调零键、量程转换键、自动测量键、显示暂停键,键盘以中断方式工作。同时经8279扩展出双8位的数字表头,一个用来显示交变磁场频率,另一个由软件控制根据不同的磁场显示不同数值。当测量稳恒场时,显示磁场值;当测量脉冲场时,显示峰值;当测量交变磁场时,由软件控制依次显示正、负峰值及峰峰值,显示时间间隔由软件控制为5s,当按下显示暂保持键时,保持当前显示数据,再次按显示保持键,显示下一个数据。
参数存储器X24128与霍尔器件封装在一起,通过串行总线和主机相连。
定标电路设计及工作原理
定标电路主要由一个压控恒流源和提供控制电压的D/A转换电路组成。压控恒流源由两个高阻型双运算放大器LM358构成,其原理图如图2所示。
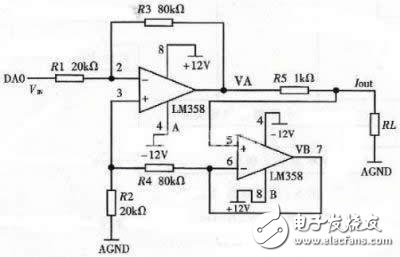
图2:压控恒流源原理图
从图中可得出:
Iout=—4VIN(mA)
式中,VIN由16位D/A转换器MAX541提供,可在0~2.5V之间以0.04mV的分辨率调节。那么恒流源电流可在0~10mA之间以0.161μA的分辨率调节,完全可以满足一般霍尔器件的恒流工作要求。
信号处理与采集电路
为了对不同类型磁场进行高精度测量,本系统信号处理电路由程控放大电路、数字调零电路、峰值检测与保持电路组成。处理后信号的采集由MAXlll通道1完成。
数字调零电路
由于制作工艺的原因,霍尔器件总有不等位电势存在。为了适应自动测量的需要,不等位电压的补偿由数字调零电路实现,其原理图如图4所示。该电路实际上是由两个运算放大器构成的加减运算电路。在系统初始化时,对不同量程进行调零,并将对应的补偿电压数值存在RAM中;测量过程中量程转换或手动选择量程后,可直接查询相应的数值,由D/A转换器输出补偿电压。由于采用了高精度的A/D和D/A转换器,调零后的不等电位小于0.1mV。
峰值检测与保持电路
为了测量脉冲磁场和交变磁场的峰值,本系统含有由采样保持器LF398[5]和逻辑控制电路组成的正负峰值检测保持电路。正峰值检测保持电路原理图如图 5所示。LF398的控制端8的逻辑值E=(A+B)*D,当E为高时LF398处于跟随状态,输出电压等于输入电压;当E为低时LF398处于保持状态,输出保持不变。峰值保持电路的工作过程是:当进行数据采集时,使P2.0置低电平,P2.1置高,这样LF398的控制端完全取决于LM319比较器的输出端。LM319的输出电平可由LF398的输出电压Vo和输入电压Vin比较的结果决定。当输入电压Vin高于输出电压Vo时,LF398的逻辑控制被置成高电平,使LF398处于跟随状态;当输入电压Vin达到峰值而下降时,LF398的逻辑控制端被置成低电平,使LF398处于保持状态,从而实现了对“峰值”的保持。在采样状态,为了使保持下来的峰值不被下一个不同的峰值冲掉,当检测到P1.2被置成低电平(LF398已经取得峰值)时,使 P2.1脚置低电平,从而封锁了输入信号。在测量稳恒磁场和交变磁场时,为了提高准确度,常需要转换量程。每次转换量程后,先把P2.0和P2.1置高,使LF398处于跟随状态,延时50μs,使得LF398的输出和输入相等;然后将P2.0置低,进入峰值检测状态,即可完成量程转换。
负峰值检测电路只是在正峰值检测电路之前加了一个反相器,逻辑控制部分由P1.3、P2.2、P2.3完成。保持下来的峰值经一个模拟开关CD4051后由MAXlll的通道1检测。
频率测量
由于AT89C52含有三个定时计数器,测量频率非常简单方便,只需对调零后的输出信号进行适当的放大,其后经过一个过零滞回比较器整形后得到方波信号,再通过一个四分频器输入到AT89C52的计数器T1和外部中断INT0即可。为了更加准确地测量频率,当信号频率高于5kHz时用测频法,即关中断 INT0,把定时器TO设定一个时间to,开计数器T1,计数器溢出一次,则把内存中某个单元加1;若to时间内计数值为N1,可求得被测信号的频率为 4Nl/to。频率低于5kHz时用测周期法,即关计数器T1,开定时器TO,中断INT0以边沿方式触发,发生第一次中断时,TO计时为t1,再次发生中断时关掉中断,此时计数器TO计时为t2,则被测信号的周期T=(t2-t1)/4、f=4/(t2-t1)。为了测较低的信号频率,可以使TO循环计数。由于加了四分频,该方法可测小于2MHz的信号。
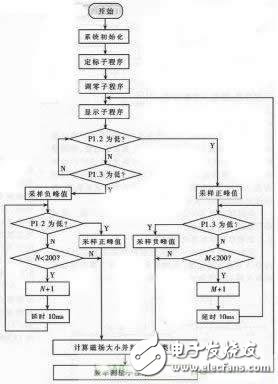
图3:仪器软件流程图
仪器的软件设计
仪器软件采用汇编语言编写,包括主程序、定标子程序、调零子程序、数据采集子程序、显示子程序、键盘中断服务子程序、频率测量程序、A/D转换程序、D /A转换程序、计算磁场大小子程序等。系统默认为自动测量模式,选择最大量程。在键盘中断程序中,不同的键被按下,执行不同的程序。在数据采集子程序中,判断是否为手动,若是则直接采集,并保存数据。若不是则判断量程是否合适,不合适则转换量程重新测量,并保存上次测量值。若转换后测量为零,说明为脉冲场,以上次测的值为准。因此,对于脉冲场,若知道其场强范围,最好手动选择量程。仪器软件流程图如图3所示。
该测场仪以单片机为核心,采用串行存储器扩大了磁场测量范围,采用压控恒流源技术解决了霍尔探头更换后的定标问题。该仪器具有自动量程转换功能,并能同时测量磁场频率,其磁场的测量范围为:0.01mT~6T,测量精度优于量程的±0.2%,特别适合于磁场大、类型未知的测量场合。
技术专区
- 激光切割加工之激光焦点位置检测与控制技术分析
- 蜂窝网与无线局域网未来以及测试方案
- 功耗分析测试入手,详谈IOT测试解决方案
- 近红外光谱分析的应用前景 NIR光谱仪四种用途
- sub-6GHz非独立式的5G NR网络测试