



目前,跌倒检测方法最常见的是视频图像分析法和穿戴式装置检测法。前者使用视频摄像头,不能保证用户隐私安全;后者是传感器装置,需要基站来服务,外出时易忘记佩戴。使用智能手机进行跌倒检测是一个可行的且有很大发展潜力的技术,智能手机同时结合了跌倒检测系统的两个重要组件: 跌倒检测和救助通信,不仅可以降低系统成本,实时监测人体活动,还可以结合GPS确定用户的跌倒位置。现在,国内外已有利用手机进行跌倒检测的相关理论研究,都是使用移动手机内置的加速度传感器和基于人体运动加速度特征的不同算法来检测跌倒的。然而一些较高强度日常活动如慢跑、快速坐下等也会产生一个类似跌倒的大加速度值特征。因此,单独使用加速度传感器进行跌倒检测,采集的数据比较单一,不足以完全反应人体姿态变化,会给跌倒检测带来许多假警报。针对以上问题,本文提出了基于信号向量模和特征量W 相结合的跌倒检测算法。该检测算法同时利用加速度传感器和陀螺仪监测人体姿态变化,有效减少了跌倒检测结果的假阳性和假阴性。
1 跌倒检测方法设计
加速度传感器和陀螺仪分别能够测量三轴方向运动加速度和角速度大小信息,本文利用智能手机内置的这两种传感器来采集反映人体主要运动姿态变化的信号数据。通过使用信号向量模(magnitude of signal vector,SVM)阈值法来识别区分低强度日常生活活动(acTIviTIes of daily living,ADL)与跌倒,对于阈值法不能识别的较高强度ADL,则通过对角速度信号向量模数据进一步处理得到的新特征量来判别。
1.1 信号数据
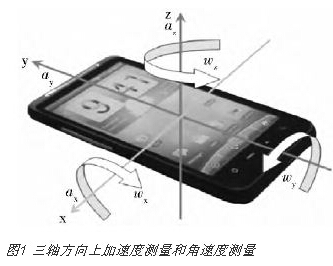
人体活动主要分为以下几种:躺下、步行、坐下—起立、上楼梯、下楼梯、慢跑、蹲下—起立以及跌倒等。人体携带的智能手机,其内置的加速度传感器和陀螺仪输出的信号数据可以反映出人体日常运动姿态变化。图1为智能手机在x、y和z三轴的加速度方向及角速度方向。

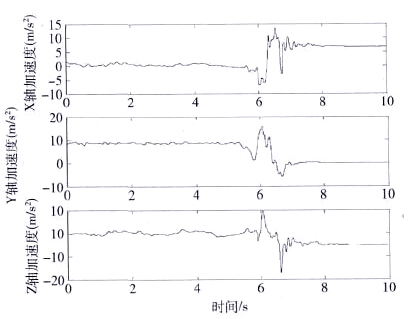
传感器输出信号中掺杂了大量的脉冲噪声,中值滤波是传统的消除脉冲噪声的方法。中值滤波器是一个非线性信号处理技术,它使用一个给定长度的窗依次滑过原始信号序列,然后将窗内居中的样本值用该窗所包含信号序列的中值替代,这里滤波器窗口大小n设为3。图2为加速度传感器输出信号数据经中值滤波后曲线图。
1.2 信号向量模(SVM)
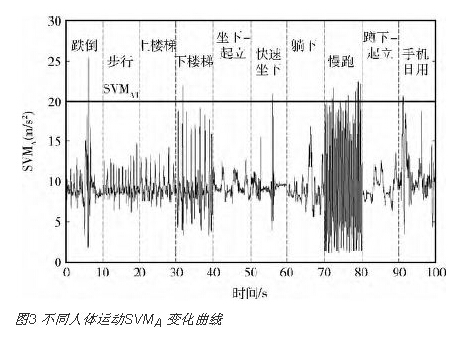
跌倒发生时的加速度及角速度变化主要体现在某空间方向,因为跌倒事件中无法预知跌倒的方向,所以不宜用某一轴的加速度或角速度数据去判断跌倒的发生,采用信号向量模SVM 特征量可以将空间的加速度或角速度变化集合为一矢量。加速度信号向量模(SVMA )及角速度信号向量模(SVMW )其定义分别如式(1)和式(2)
其中,ax ,ay ,az分别为加速度传感器x、y、z三轴方向输出经中值滤波后信号;wx ,wy ,wz分别为陀螺仪x、y、z三轴方向输出经中值滤波后的信号。
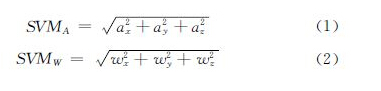
图3 和图4 为人体处于不同运动状态时SVMA及SVMW变化曲线。
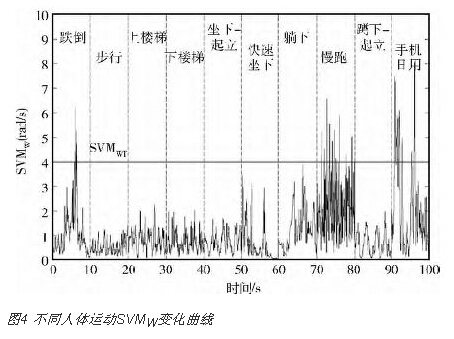
如图3、图4所示,跌倒具有大加速度和角速度峰值特征,这是因为摔倒过程中由于和低势物体碰撞产生的SVM峰值比日常活动中步行、上楼梯等大多数一般过程要大。然而人体运动行为过程具有复杂性和随机性,使用单一的加速度相关信息判断人体摔倒行为的发生会带来很大的误判。本文使用SVMA及SVMW相结合的信息阈值法可以区分跌倒与产生SVM 峰值较小的低强度运动。通过对人体摔倒过程及其它日常生活行为过程中实验结果数据SVMA和SVMW进行分析,本文识别跌倒的加速度信号向量模阈值取 SVMAT =20m/s2 和角速度信号向量模阈值取SVMWT =4rad/s。
但是慢跑等动作也具有大加速度和角速度峰值的特征,单独的SVM 特征量并不能区分摔倒过程与慢跑或手机日用等较高强度运动过程。
1.3 SVMW数据曲线处理
根据人体运动学特征,跌倒过程与慢跑等运动过程的人体俯仰角或者侧翻角变化有很大不同,然而采集人体运动姿态变化信号数据的智能手机在口袋中的放置方位具有随意性,因此无法直接使用陀螺仪单轴方向输出得到的角度变化信息作为跌倒判断的一个特征量。本文对角速度信号向量模数据作进一步处理,来寻找新的特征量。
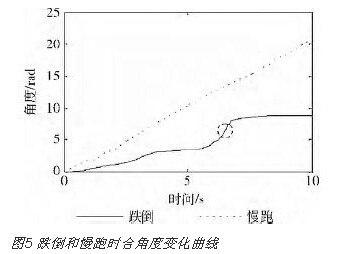
这里定义一个人体跌倒时躯干倾斜的合角度θ,它是通过对角速度信号向量模数据进行积分得到的,如下式

式中:SVMW ———人体运动角速度信号向量模。下面以慢跑为例,分析跌倒与慢跑等较高强度运动的合角度曲线变化的不同,图5为跌倒和慢跑两种运动过程合角度变化曲线, 从图5中可以看出:跌倒曲线有明显的拐点(图中圆圈所示),而慢跑曲线变化比较均匀平缓。这是因为跌倒过程中人体会和低势物体产生碰撞,短时间内会产生较大的SVM 数据值,体现在数据曲线上则有突变的增量点;而慢跑每次动作基本一致,随时间产生的数据曲线点增量也基本一样,数据曲线近似一条直线。
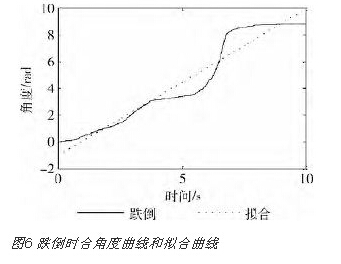
应用智能手机作为跌倒检测系统,易于对数据进行公式化处理,本文中采用数据拟合的方法对合角度曲线数据公式化处理。前面分析中得知,两种运动过程合角度曲线变化趋势有很大不同,且慢跑运动合角度变化曲线近似一条直线,因此使用直线拟合模型可以突出两种曲线与各自拟合曲线相似度的不同。这里使用计算简单的最小二乘法线性拟合,拟合直线表达式为
y=ax+b (4)
式中:a,b———拟合直线的斜率和截距。图6和图7分别为跌倒和慢跑两种运动的合角度变化曲线及使用Matlab线性拟合变化曲线。
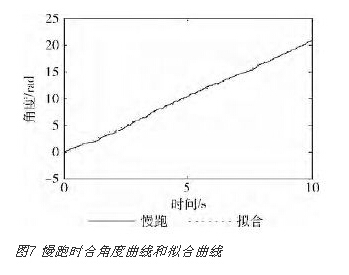
为了反映出两种曲线与各自线性拟合曲线的相似度,这里我们定义一个无量纲量W,也是本文算法的跌倒判断特征量,其计算过程如下式
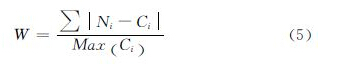
其中,i=1,2,3,…,500,(处理10s内数据样本点),Ci为合角度数据样本点,Ni为合角度线性拟合数据样本点。特征量W 反映的是合角度曲线与其拟合曲线之间的相似度,W 值越小相似度越高。
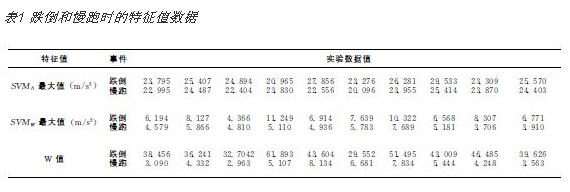
由前面的分析得知,跌倒合角度曲线有拐点,慢跑合角度曲线变化平缓,而使用的拟合曲线为一条直线,故跌倒时得到的W 值较大,而慢跑时得到的W 值会较小。表1所示为一组实验结果的特征值,观察特征值数据可知容易通过设置一个阈值WT来区分这两种运动过程,本文通过对跌倒过程和慢跑等较高强度运动过程中W 值的分析取WT =25。
技术专区
- Alexa语音服务软件扩展STM32Cube
- 结合DNN API驱动未来神经网络应用的解决方案
- 针对于高端移动通信和汽车市场的四集群设计
- 一款基于帧捕捉的开源图形调试器应用设计
- 即将成为标准配置的最新安全技术:后视摄像系统




