



1 引言
随着U盘、数码相机、mp3音乐播放器等移动设备的广泛应用,FLASH存储器已经逐步取代其它半导体存储元件,成为嵌入式系统中主要数据和程序的载体。NAND FLASH是一种可在线多次擦除的非易失性存储器,其结构提供了极高的单元密度,可以达到数据的高密度存储,并且写入和擦除的速度也很快,所以 NAND FLASH是高密度数据存储的理想[2] 。本文主要从物理层,逻辑层和驱动文件系统接口层三个方面具体分析NAND FLASH驱动程序的实现。
2 物理层驱动实现
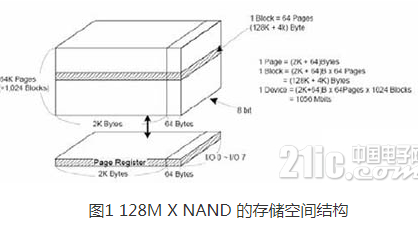
NAND芯片的存储空间是按照块和页的概念来组织的。现在市面上的NAND主要按大页和小页两种存储类型来进行数据管理。本文采用的NAND型号是K9F1G08X0A,该NAND为大页结构,即芯片每块()有64页(Page),每页有2K 的数据存储区和64的冗余数据区(用来存放ECC校验码)。2K 的数据存储区作为数据缓冲单元,用来实现I/0缓冲和存储器之间的数据传输。芯片的存储阵列组织如图1所示。

NAND FLASH的物理层驱动主要涉及到:NAND的初始化(ID以及相关属性信息的读取)、擦除(以块作为单位),数据读写(以页作为基本单位)。在这一系列的过程中,会涉及到NAND命令的发送以及NAND地址的发送。其中地址的发送会因NAND型号的不同而有所区别。一般来说,小页的NAND其地址周期通常为4个:1个列地址(Column Address)和3个行地址(Row Address),而对大页的NAND来说,列地址至少是2个周期,行地址会因芯片的容量大小而有所区别。本文采用的三星NAND芯片是2个列地址和2个行地址。对于NAND FLASH 来讲,地址和命令只能在I/O[7:0]上并行传递。NAND FLASH 以页为单位读写数据,而以块为单位擦除数据。NAND的数据传输方式有基本的I/O传输方式,即在I/O[7:0]数据线上进行的数据传输。这种操作的缺点是系统CPU要频繁参与控制数据的传输,会影响到数据传输速度。本文采用DMA传输方式,数据宽度是8/16/32bit,通过中断的形式通知CPU数据的传输情况,DMA传输主要涉及DMA 控制器的配置以及通道的选择。
3 逻辑层驱动实现以及坏块管理机制
3.1 逻辑基本读写操作
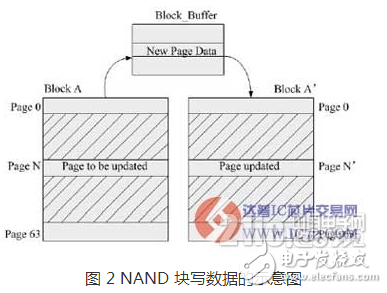
驱动逻辑层的主要任务是整合物理层的驱动,并为文件系统驱动层提供接口。在该层中主要涉及的操作包括NAND 的逻辑读、写以及擦除。逻辑层对NAND 的操作都是以块()作为单位来进行操作的。因此须在逻辑层中构建一个块缓存( Buffer)来临时存放读出/写入NAND 的数据。这样,NAND 的读取机制分为两种:页读取(Page )和块读取(Block)。在页读取时,通过坏块表进行索引指定块(Block)和页(Page)来进行数据读操作,而块读取时则是通过整合页读取时的缓存数据,把NAND 的数据以块的形式进行缓存(BlockBuffer)。NAND 的写入机制不像其它的FLASH 器件,NAND 要求在写入数据时,首先必须进行数据的擦除。因此我们在写数据的时候,先把将要被写入的数据块的内容读出到块缓存,然后再把要写入NAND 的数据以页为单位的形式写入块缓存(Block Buffer)中的对应地址。接着把以前存放数据的块进行擦除操作,最后把更新的数据写到NAND 去。经过这一系列的操作,实现了NAND 数据的逻辑写入。图2 说明了一次写操作的具体流程。
3.2 坏块管理机制的原理及实现
NAND 由于采用了高密集的存储单元,在使用过程中难免会损坏一些存储单元,这就是我们所说的坏块[3]。数据操作时应该避免对这些坏块进行操作,否则会引起数据的错误。
一般而言,NAND 的第0 块常被用来作为程序的引导区,因此NAND 芯片厂商会保证第0块不会成为坏区。而作为0 块以后的数据存储块,当坏块产生时,系统级的设计必须能够用地址映射把这些坏块屏蔽掉。芯片在出厂时,除保存坏块信息的区域外,部分一律被擦除(值为0xFF),对坏块的读操作是允许的,但不推荐进行写和擦除操作,以免由于结构方面的原因使邻近的块也失效。系统设计时必须根据初始的坏块信息识别出坏块,并建立坏块列表。进行写或擦除操作时将欲操作块的地址与坏块地址表的地址相比较,若是坏块则应跳过。芯片在使用过程中,可能有新坏块的产生,为了系统的可靠性,必须对此情况加以考虑。
在数据写入或块擦除操作后,如果读状态寄存器出现错误,则表示块内有坏页存在,也即表明此块已坏,因为块内坏页的存在并不影响页的读写,这时可采用块操作来把页内有用数据转移到空闲块内,并把坏块信息存入坏块表中。因此,当我们在格式化NAND的时候,要给出一定的区域用来存放坏块索引表和坏块表。考虑到一个块(Block)的大小为128KB,而现在市面上的一般的NAND的容量大小为128MB-2GB不等。故分配10 个块(Block)来进行存储。由于第0 块为用户不可见块,实际要求为1-11 块作为存储空间。图 3 表明了如何建立坏块索引表和坏块表的流程。
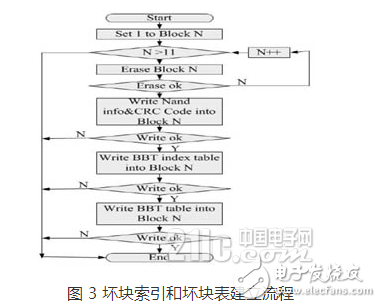
其中,在坏块索引(BBTINDEX)中,整型变量biTIsBadBlock 中的每一个bit,标记一个块的状态(1 表示坏块,0 表示好块),在ARM 体系中,可以标记32 个块。该区域被称为一个索引区域。整型变量mPosInBBT 表示如果有坏块,则表示索引区域在坏块表中的偏移。
这样通过定义一个索引tableTopPos 变量,来指示下一个坏块在数组中的位置。同样在坏块表(BBTENTRY)中,整型变量mBadBlock 标志块是坏块,而mReplaceBlock 变量则表示该坏块在备份区中对应的可以的好块。这样通过定义一个索引bakupTopPos 变量,来指示下一个坏块在备用区的位置。通过结合坏块索引和坏块表,可以对数据进行准确的操作,而每次对NAND 操作完成后,及时地更新坏块索引和坏块表。
4 文件系统层的接口实现
现在一般对NAND 支持的文件系统用的最多的是YAFFS 文件系统。本文由于基于的操作系统平台是uC/OS,故采用了uC/FS 文件系统作为NAND 的文件驱动接口,uC/FS 文件系统进行的操作都是基于FAT 文件格式的。对用户来说,所用对NAND 的操作,都是通过文件接口层来完成的。文件接口层对数据的操作都是以扇区(Sector)来进行的。因此,文件接口层的主要任务是把从逻辑层的逻辑操作转化为以扇区(Sector)为单位的操作,文件系统的接口函数主要通过一个结构体 (FS___)来进行描述[4],该结构体包含了驱动设备的名称以及4 个基本的驱动设备挂接函数的函数指针。
在这几个函数中,dev_status()函数主要实现FAT 表状态信息的读取,并表明该NAND 设备可以使用;dev_()函数实现对NAND 进行文件系统块数据的读取;dev_write()函数实现对NAND 进行文件系统块数据的写入;dev_()函数则主要实现文件操作的相关指令,包括文件格式化,数据cache 回写等操作。通过这几个文件接口函数,用户可以实现对NAND 进行的数据基本操作。
其中,mCache 数组大小为数据读取时的存储大小,由NAND 的文件系统遵循 标准决定,大小为512Byte;mTImes 表示被Cache 的块(Sector)的命中次数,反映了数据块的存取几率;mSectorId 表示被Cache 块(Sector)的序号,通过该序号来对Cache 的数据块进行索引。
5 总结
对大容量的 NAND FLASH 进行数据操作,坏块处理机制是很重要的,通过建立坏块处理表,避免了对无效块进行的操作,提高了数据的准确性。另外,ECC 作为NAND 纠错机制,在NAND 驱动中也广泛运用,本文的NAND 驱动中也加入了ECC 机制,由于篇幅有限,不对其进行深入探讨。
技术专区
- UltraSoC联手Percepio 嵌入式调试工具实时交流和分享重要信息
- 基于sopc嵌入式文字识别系统设计
- 中国机器人(含无人机)市场将在2022年达到5560亿元人民币
- NAND FLASH驱动程序实现的三个具体方面分析
- 基于树莓派和openHAB2的家庭设备控制平台设计详解




