
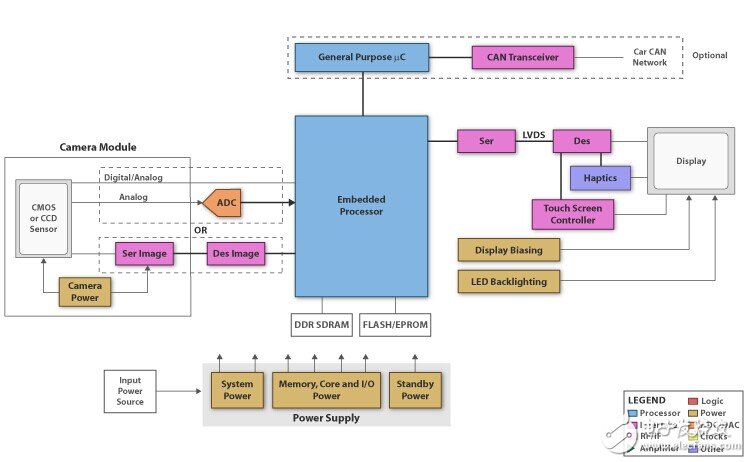
车用视觉控制系统处理来自数码摄像机、激光器、雷达和其它感应器等来源的数据信息,以便执行诸如路线起程提示、瞌睡感应或停车辅助之类的任务。处理过的信息会显示在显示屏上或通过声音警告信号广播出来。
电源管理:电源与12V或24V的网板相连接,上/下调节电压以适用于DSP、uC、存储器和IC及其它功能,例如步进电机、通信接口、显示偏差和背景。当尝试小型、低成本且高效的设计时,由于需要多个不同的电源轨,因此电源设计就成了一项关键任务。具有低静态电流的线性稳压器有助于在待机操作模式(关闭点火)过程中减少电池漏电流,是与电池直连的器件的负载突降电压容限,需要低压降并追踪低电池曲轴操作。
除了提供增强的转换效率,开关电源还为EMI改进提供了开关FET的转换率控制、跳频、用于衰减峰值光谱能量的扩频或三角测量法、低Iq、用于电源定序和浪涌电流限制的软启动、用于多个SMPS稳压器以减少输入纹波电流并降低输入电容的相控开关、用于较小组件的较高开关频率(L和C的)和用于欠压指示的SVS功能
通信接口允许汽车独立电子模块、信息娱乐系统的远程子模块以及USB存储器或视频源等外部器件相互间的数据交换。高速CAN(速率高达1Mbps,ISO119898)是一款双线容错差动总线。它具有宽输入共模范围和差动信号技术,充当互连车内各个电子模块的主要汽车总线类型。LIN支持低速(高达20kbps)单总线有线网络,主要用于与信息娱乐系统的远程子功能进行通信。LVDS接口用于通过高速串行连接将大量数据传输至视频屏幕或视频源(数码摄像机芯片)。
显示:某些车用视觉系统具有显示支持功能,例如停车辅助。根据显示类型的不同,用于显示偏差的电源解决方案需要放置在LED或CCVF驱动器顶部以进行背光控制。视频信息可以直接从uC中或通过LVDS接口发送,具体取决于显示内容的大小。
微处理器:通用uC处理系统控制功能以及与其它车内模块的通信。核心数字功能是DSP,它负责处理来自数字输入源(例如CCD摄象机)的数据。可能需要简单的屏幕驱动到复杂的数字算法(例如模式识别),具体取决于所需的性能。MCU还需要足够高的性能速度才能实时地为步进电机提供服务。
技术专区
- TIDA-01421用于无传感器位置测量的脉冲计数器参考设计
- TLE9842-2QX主要特性_PCB设计图
- CMU机器人研究所_无人驾驶上路测试牌照Gatik.AI
- DRV10983-Q1主要特性_功能框图
- 自动驾驶汽车由自动驾驶机器人系统操控




