



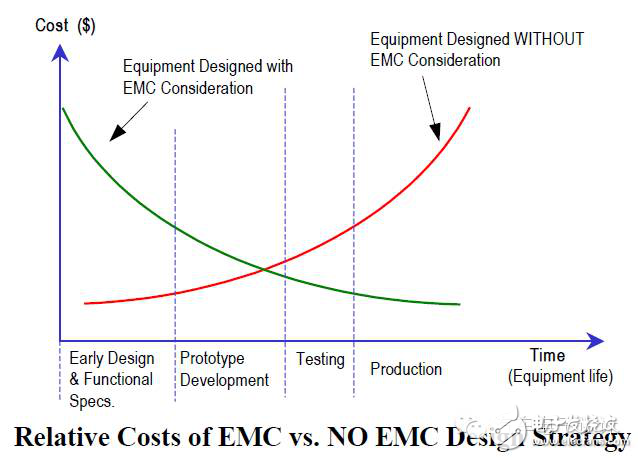
周岩兄弟给我投了一份材料,我在此基础上做了一些整改,本文是我们两个材料的整合。大家做EMC实验给实验折腾的很痛苦,实际的成本。

国内追索的情况更多的是直接坏的情况,这是一种坏的情况是大家都看得明白的。
案子1
– 某种中高档次轿车,具有高性能ABS系统。样车在一次实况测试中遇到了雨天,启动雨刮器,在某一车速运行时,ABS突然失去了作用
– 后果,车辆损坏
案子2
– 国内生产的某一型号微型汽车,其发电机调节器经常出现易被击穿损坏现象
– 经查,当雨刮器工作时,这种损坏现象就容易发生。
造成这种现象的主要原因是雨刮器。雨刮器驱动电机作为感性负载,在切断电源时会产生反向电流并通过电源线传输到供电系统中,从而在电源系统中产生干扰脉冲,一些电子部件在这种干扰脉冲条件下,不能正常工作,甚至导致损坏。
案子3
– 某种国内开发生产的安全气囊,在汽车整车装配线上突然引爆
– 经对该安全气囊的电子引爆控制器进行试验检查,发现其不能承受较强的环境辐射电磁场,当有静电放电发生时,会有误动作。
分析结果:操作现场的工人的身体静电引爆气囊
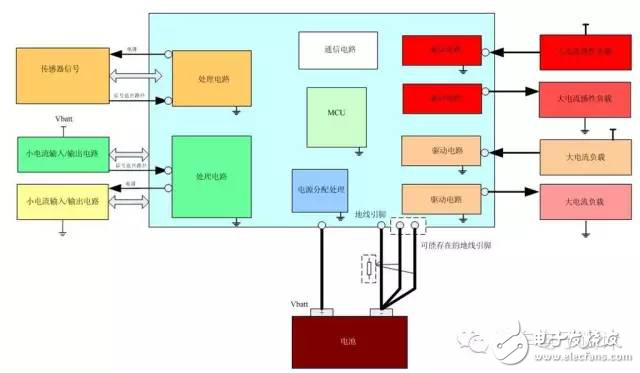
如下这种就是埋坑给整车企业的工程师了,布线实际到ECU这里就出现下面这种情况了。
所以总的来说,我们是先设计:
板级的地线策略,结合着EMC的规范
系统级的接地和保护
这里就是把理念级别的,和框图级别的合起来
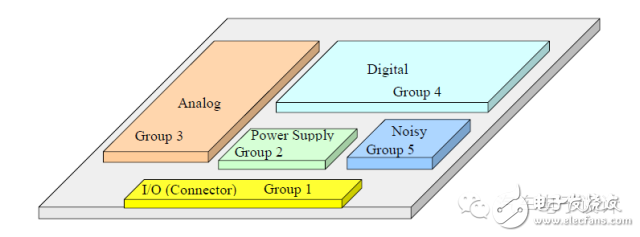
1)原理图阶段
区分模块外部存在弱小的传感器信号、普通的小电流的信号、大 电流的输出驱动和大电流的感性负载驱动。
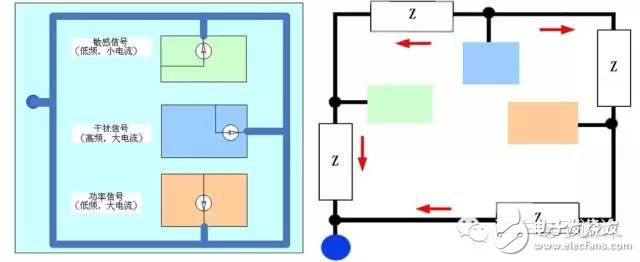
对于低边驱动的时候,信号的返回路径都是通过模块的地线返回的;
高边开关则是通过模块的电源抽取电流的,根据这些 特点我们将电路进行基本分组。
这里实现的还需要后面执行和考虑
技术专区
- GM Bolt的OTA升级,电芯有问题靠软件来弥补
- 2025年将形成超500亿美元市场规模,计算与算法结合是自动驾驶“
- 实例分析基于车载时钟芯片如何实现显示屏1s以内时钟误差
- 一文读懂汽车电池模组拆解及工艺
- 77GHz雷达信号处理流程框图及应用方案




