



为实现自动驾驶目标,ADAS应用如火如荼展开,各式智能汽车内建的微控制器、传感器芯片,以及绘图处理器需求日益攀升,进而带动半导体厂商推出符合车规,性能佳且具高整合度的产品。
达成自驾车愿景 汽车供应链业者总动员
在1993年上映的超级战警(DemoliTIon Man)电影中,几乎所有的汽车都是自驾车,但当然,它们都是概念车而已。今天,已有超过十家的领先汽车制造商(包括奥迪、BMW、GM、Tesla、福斯和Volvo)都在开发无人驾驶汽车。此外,Google也自行开发汽车技术,最近已成功行驶超过100万英哩(相当于一般美国成人驾驶75年的里程数),而且没有发生重大的意外。

电影超级战警中已出现自动概念车原型看看这些令人折服的成果,许多人可能都会问一个问题:要在多久的未来,我们才能真正看到无人驾驶车在道路上行驶?
为达成此一愿景,由半导体业者、系统整合商、软件开发人员及汽车制造商所组成的复杂汽车供应链,所有这些公司都密切合作,试图开发出关键的先进驾驶辅助系统(ADAS)技术,以供首款商业化的无人驾驶车采用。此嵌入式电源IC是针对机电整合马达控制解决方案而设计,适用于各种马达控制应用,而这类应用必须采用小尺寸(SFF)封装,以及最少的外部组件。
导入ADAS三大设计方式
要在汽车中导入ADAS功能,目前主要有三种设计方式。
其中一个做法是藉由储存大量的地图数据,让汽车能够用来在特定的环境中进行导航。此一方法就好比是让一辆火车在隐形的轨道上行驶一样。采用此种方式的范例之一是Google的无人驾驶车,它主要是利用一组预先录制好的街道HD地图来导航,很少用到感测技术。在此例子中,汽车仅依赖高速通讯连接与传感器,并保持与云端架构的稳定连结,以提供其所需的导航坐标。

Google的无人驾驶车采用大量地图数据进行导航相对地,另一种技术则是利用计算机视觉处理,对预制地图的依赖程度非常低。此做法复制了人为驾驶的模式,因为汽车能够根据内建的多颗传感器与高效能处理器来实时决策。这类的汽车通常会包含多台可看远景的相机,并利用特殊的高效能、低功耗芯片来提供超级计算机等级的处理功能,以执行ADAS软件和硬件算法。
以 Mobileye为例,该公司一直是此技术的先驱者,其功能强大且节能的EyeQ SoC是专为无人驾驶车所设计。举例来说,针对Tesla电动车最近提供的高速公路自动导航功能,MIPS-based Mobileye EyeQ3 SoC便足以支持其所需的处理效能。在此案例中,Mobileye采用多核心、多线程MIPS I-class CPU来处理来自汽车中多台相机的数据串流。
在下图中,EyeQ4 SoC中的四核心、四线程interApTIv CPU作为芯片的大脑,能指引来自相机以及其他传感器的信息流,将其引导至芯片右边、处理速度高达2.5TFLOPS的VLIW功能方块。
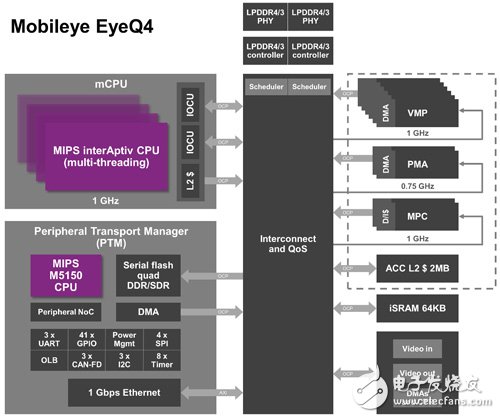
EyeQ4 SoC具备四核心、四线程interApTIv CPU最后,第三种趋势是利用通用型SoC处理器来开发无人驾驶车。对于已经配备嵌入式GPU以支持信息娱乐系统的汽车,开发人员能利用绘图引擎的运算资源来执行车道、行人、汽车、建筑物外观、停车场等各种辨识与追踪算法。例如,Luxoft的计算机运算与扩增实境解决方案便采用ImaginaTIon的PowerVR影像架构,以及额外的软件来建置ADAS功能。

PowerVR影像架构可快速建置各种车内自动驾驶功能
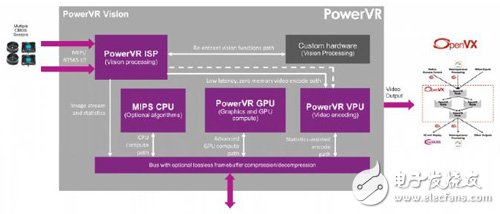
PowerVR Series7 GPU示意图此软件架构已针对嵌入式PowerVR硬件进行了优化设计,有助于快速且具成本效益地建置各种的车内自动驾驶功能。
自驾车将带来无限商机
不管是哪一种设计方式,无人驾驶汽车都能为汽车制造商、传感器供货商,以及半导体产业开创未来的光明前景。这些汽车将能因具备硬件内存管理、多线程与虚拟化功能的先进SoC模块与高效能微控制器而获益。这些功能可让OEM业者建置更复杂的软件应用程序,包括基于模型的流程控制、人工智能,以及先进的视觉运算等。
技术专区
- TIDA-01421用于无传感器位置测量的脉冲计数器参考设计
- 传特斯拉明年11月生产ModelY_与Model3同一平台
- TLE9842-2QX主要特性_PCB设计图
- CMU机器人研究所_无人驾驶上路测试牌照Gatik.AI
- DRV10983-Q1主要特性_功能框图




