



通用汽车在2018年1月13日发布通用无人车安全报告,并宣称将在2019年量产基于Bolt纯电动车改装的无人车,本文根据公开资料对通用无人车做一些分析估计,仅供大家参考。


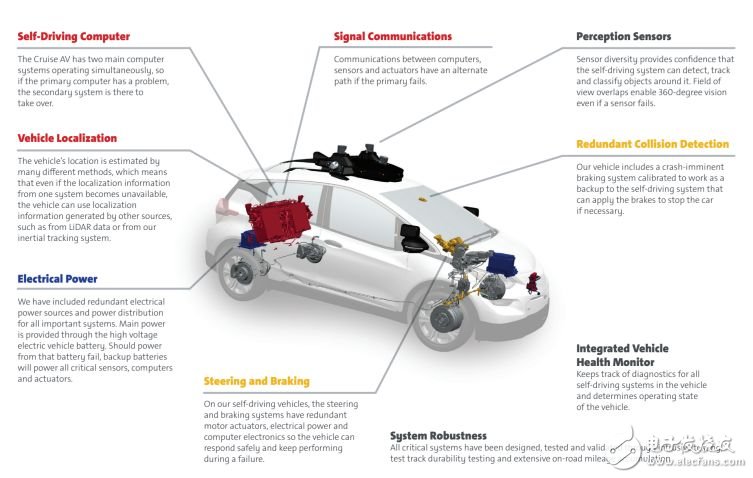
通用的无人车没有方向盘和踏板,显然是无法人工介入,也彰显通用对自己无人车技术的信心。同时也显示出传统车企在无人车领域强大的竞争力,如果谷歌想要做类似的无人车,那么谷歌必须求助于菲亚特克莱斯勒FCA为其定做。这就是新兴造车企业或IT自动驾驶企业的尴尬之处,不和传统车企合作,它们无法拿到一款相对比较优秀的改装平台,算法再强大也无法落地。
新兴造车企业或IT自动驾驶企业也无法得到优秀汽车厂家的支持,因为优秀汽车厂家视其为竞争对手,只会尽力打压,不会出手援助。只有非主流的车厂,才不把新兴造车企业或IT自动驾驶企业视为竞争对手,同时为了消化过剩的产能,乐于与新兴造车企业或IT自动驾驶企业合作。另一个尴尬的是特斯拉,虽然只达到SAE分级中的L2,但是宣传成L4,一时占尽风头,然而技术力量不足。L2终究是L2,奥迪A8的L3和通用Cruise的L5(也未完全达到SAE的L5级,称L4+更合适)无论在实际应用和宣传上都超过了特斯拉。
Model 3迟迟未达预期,特斯拉在2017年第四季度预期交付Model 3新车2917辆,但实际只交付了1550辆,12月仅交付517辆。作为Model 3的竞争对手,通用的Bolt销量持续攀升,7月销量为1971辆,11月达3747辆,12月销量达3327辆,同比大增近5倍,是Model 3的6倍。全年销量超过23000辆,对通用来说产能完全不是问题,每月3万辆的产能也能轻易达到。
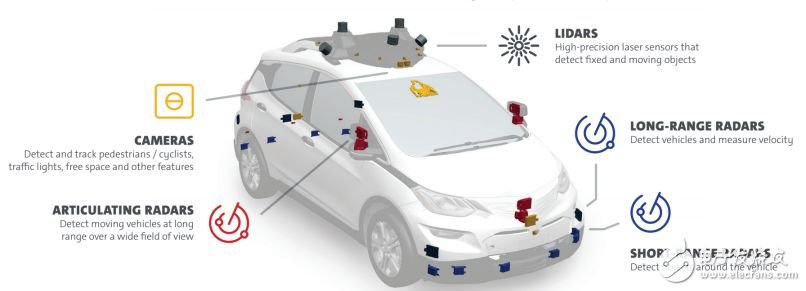
通用这辆无人车采用5个激光雷达,21个毫米波雷达,16个摄像头。5个激光雷达是Velodyne的VLP16 16线激光雷达。今年1月初,Velodyne下调VLP16的售价,从7999美元到3999美元,百度和福特作为Velodyne的大股东,可以赚通用的钱了。21个毫米波雷达中12个79GHz毫米波雷达由日本ALPS提供,两个前向两个后向长距离毫米波雷达推测由德国大陆提供,型号可能是ARS-408。5个高分辨率(通用称之为ArTIculaTIng)毫米波雷达由德国博世提供,主要是车两侧和正前方。
16个摄像头中,车顶10个,包括一个基线长大约8厘米的双目摄像头,8个360度环视摄像头,摄像头周围均有红外LED,可以在低照度甚至黑夜下工作,当然分比率会下降很多。车内后视镜位置有一个非无人驾驶版Bolt的单目摄像头,车辆最前部位置有一个长距离单目摄像头。车外后视镜和车后部各两个摄像头。
激光雷达应用
通用的原文是We start with LiDAR, which provides highly precise feedback using laser measurements for both fixed and moving objects.激光雷达首先是定位,无人车的第一步也是定位,利用激光雷达SLAM的回环检测或者与全局地图做match,进而做到厘米级定位,这是业内一致的做法,百度、谷歌和通用主流厂家都是如此。而非主流厂家大多用GPS RTK定位,有两个非常显眼的蘑菇天线,GPS RTK定位不能做大规模应用,只能用于拉投资的demo。
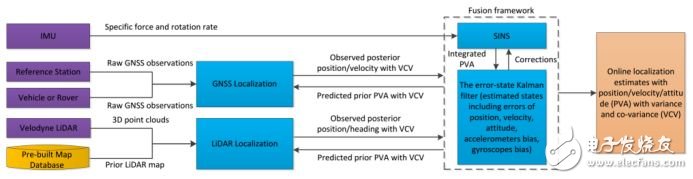
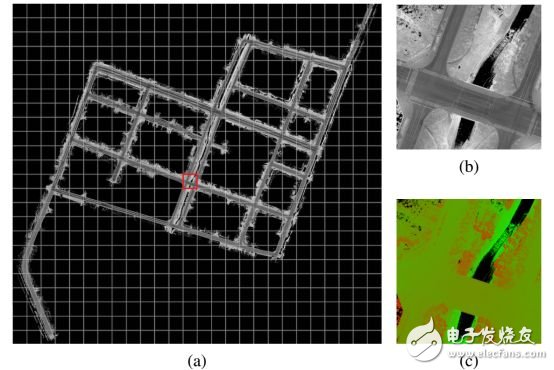
上图为百度无人车定位框架。这种定位方法的缺点是需要提前制作激光雷达地图也就是Prior LIDAR MAP,这对通用来说不是难事。通用在其超级巡航里已经制作了美国的所有高速公路的激光地图。但是如果没有提前制作激光雷达地图的区域(如人烟稀少地域广大的郊区和农村),无人车做不到厘米级定位,只能做到传统GPS最高3米的定位。
激光雷达的第二个作用是与摄像头数据融合做目标分类识别和轨迹跟踪,通用的原文是这样子:We combine LiDAR and camera data for classifying and tracking objects, making high confidence determinaTIons more quickly. This helps, for example, idenTIfy pedestrians, vehicle types and road details such as lane lines, construction zones and signage.推测由两侧朝下的激光雷达来获得道路细节,如车道线,路沿,隔离带,虚实线,斑马线。百度无人车也是用激光雷达获得道路细节,出身百度的景驰则在2018年CES上演示了只用激光雷达识别车道线、行人和车辆的技术。谷歌和丰田也是如此。
目前激光雷达检测车道线主要有四种方法,一是根据激光雷达回波宽度。二是根据激光雷达反射强度信息形成的灰度图,或者根据强度信息与高程信息配合,过滤出无效信息。三是激光雷达SLAM与高精度地图配合,不仅检测车道线还进行自车定位。四是利用激光雷达能够获取路沿高度信息或物理反射信息不同的特性,先检测出路沿,因为道路宽度是已知,根据距离再推算出车道线位置。对于某些路沿与路面高度相差低于3厘米的道路,这种方法无法使用。后三种方法需要多线激光雷达,最少也是16线激光雷达。前者可以使用4线或单线激光雷达。目前绝大部分都是采用第二种方法。这种方法的标志就是需要激光雷达尽量贴近路面或朝向路面以取得比较多的反射强度信息,丰田、谷歌都是在车最前部保险杠处安置激光雷达,通用由于保险杠附近有9个毫米波雷达和1个摄像头,估计是安装空间不足,只能放在车顶。
中间正前方的激光雷达与摄像头数据融合可以加大识别目标的速度和准确性。用激光雷达识别目标有两种做法,一种是利用激光雷达反射强度值,不同特性的物质对激光雷达反射强度差异很大,利用这个差异可以对目标进行简单分类,比如行人、车辆、建筑物、植物、路面、草地等。由于只是简单的阈值滤波器,计算量很小,速度极快,远高于深度学习的目标分类。就在2018年1月初,瑞萨宣布和初创公司Dibotics合作,Dibotics有一款增强激光雷达(Augmented LiDAR)软件,就是采用这种方法做分类识别,瑞萨将把这套软件嵌入进其芯片中。第二种是将激光雷达的点云转换为具备张量结构的密集的图像数据,然后用faster RCNN识别。后者需要强大的运算资源,处理速度比较慢。faster RCNN则是图像识别领域公认最优秀的方法。推测通用用了前一种,而摄像头的深度学习识别,通用应该也是用faster RCNN。
激光雷达还有一个优势就是擅长预测移动物体的轨迹和轨迹跟踪,这是行为决策的基础。就像人类驾驶员,可以预估行人或其他车辆下一步的方向或位置,根据这个预估来做出决策。激光雷达天生具备轨迹场(trajectory-yielding)的能力,Velodyne的16线激光雷达在美国最隆重的超级碗赛事上能够准确预测四分卫投球后球的移动位置(A Velodyne VLP-16 LiDAR read off each tossed football’s speed and direction to predict where the ball would land)。Velodyne对此非常自豪。所以通用也说用激光雷达tracking objects,这比摄像头用光流法计算轨迹并预测要快得多,运算资源消耗也远远低于光流法。
毫米波雷达应用
在美国,如果要想使用未经FCC认证的无线设备,必须先申请临时许可(STA),否则是违法行为。2017年3月17日,日本车用电子供货商 Alps Electric 申请了 STA 许可证,Alps Electric 要测试的是名为 Ukaza 的车用毫米波雷达,工作频段为 76-81 GHz。这是该频段毫米波雷达第一次公开测试。在申请中,Alps Electric 表示,公司想从 5 月 1 日起陆续测试 3,000 台 Ukaza。Alps表示 每辆车需要装配 10 组雷达,因此 3,000 台 Ukaza 只够 300 辆车使用。10 天后,通用也向 FCC 递交了类似的 STA 许可证申请,它要测试的也是 Ukaza 雷达。不过,通用工程师 Robert Reagan 在申请中要求 FCC 帮忙保密,因为测试涉及商业敏感信息。显然,ALPS的毫米波雷达是用在通用汽车上的,这就是通用要打造的300辆的无人驾驶测试车队 。
Ukaza 雷达可不是 Bolt 的唯一装备,3 月 28 日(通用申请后一天)博世也递交了自己的 STA 许可证申请。博世申请中表示,公司要在客户的自动驾驶车队测试中程雷达(77GHz),随后透过搜集的数据开发新的算法。从申请来看,博世要测试的雷达共有 650 组,够 162 辆车使用。每辆车4个,与 Alps 公司类似,博世也没有点出客户的名字,但给了测试的具体地点,从经纬度来看,这些雷达将在旧金山、底特律和斯科茨代尔测试,唯一横跨这三地测试的公司只有通用一家。
经过几个月测试后,通用可能觉得还不够,因此增加了数量,79GHz增加到12个,高分辨率(通用称之为Articulating)毫米波雷达增加到5个。博世的雷达如果是传统的77GHz毫米波雷达,应该无需再向FCC提出STA,推测可能是2-4GHz带宽的雷达,也可能博世把76-81GHz雷达(也就是79GHz雷达)称为77GHz雷达,毕竟博世不能造雷达收发器,也是79GHz雷达的可能性很高,其带宽最高是传统77GHz雷达的8倍,因此分辨率可达4厘米,称之为Articulating也说得过去。
12个79GHz毫米波雷达采用级联方式工作,这种方式足以让毫米波雷达呈现出清晰的360度全景图像,还可以同时跟踪上千目标。推测12个79GHz毫米波雷达是做冗余系统,毫米波雷达应对复杂环境的能力最强,最适合做冗余系统,在激光雷达和摄像头都失效的情况下,依然可以安全行驶到路边停车。
NXP在2018年1月11日推出MR3003和S32R274就是典型的级联设计方案,MR3003是一款3发4收的毫米波雷达收发器,NXP的级联设计最低是级联4个MR3003,达到12发16收,由S32R274做处理器,最多可支持高达20个MR3003级联,达到惊人的60发80收毫米波雷达,足以成像。
所谓级联,实际类似MIMO。多输人多输出系统(MIMO,Multiple input multiple output)原本是控制系统中的一个概念,表示一个系统有多个输入和多个输出.如果将移动通信系统的传输信道看成一个系统,则发射信号可看成移动信道(系统)的输入信号,而接收信号可看成移动信道的输出信号。MIMO 雷达的基本含义是 :雷达采用多个发射天线,同时发射相互正交的信号,对目标进行照射 ,然后用多个接 收天线接收目标回波信号并对其进行综合处理,提取目标的空间位置和运动状态等信息。
MIMO雷达虚拟阵的一个典型应用是用于雷达二维成像 ,雷达二维成像的距离分辨力 主要取决于雷达信号的带宽 ,方位分辨力主要取决于天线的波束宽度。要提高成像的距离分辨力,需要增加雷达信号的带宽是相对比较容易的。而要提高雷达信号的方位分辨力,需要增大天线或阵列的孔径 ,而这在实际中受到多方面因素的限制,有很大的难度。 目前广泛采用的解决办法是采用合成孔径技术,在不增加天线物理尺寸的基础上,得到大孔径的阵列 。与合成孔径的思想不同,MIMO 雷达是利用多发多收的天线结构等效形成虚拟的大孔径阵列,获得方位上的高分辨力。 而这种虚拟阵的形成是实时的,能够避免传统 的 ISAR成像中存在的运动补偿问题。 故MIMO 雷达在成像应用上有其独特的优势。
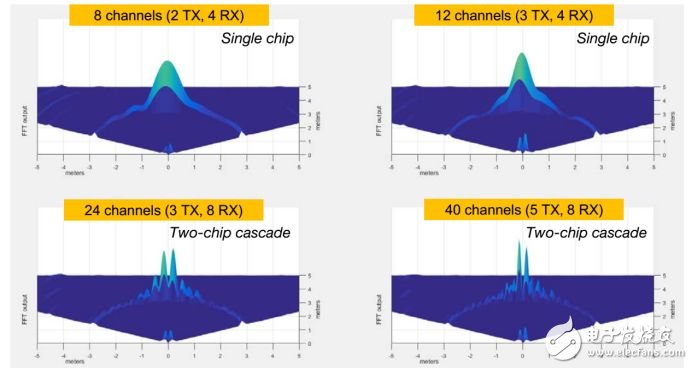
上图为德州仪器测试的多片级联雷达(MIMO)的FFT输出图,很明显通道数越多,精细程度就越高。
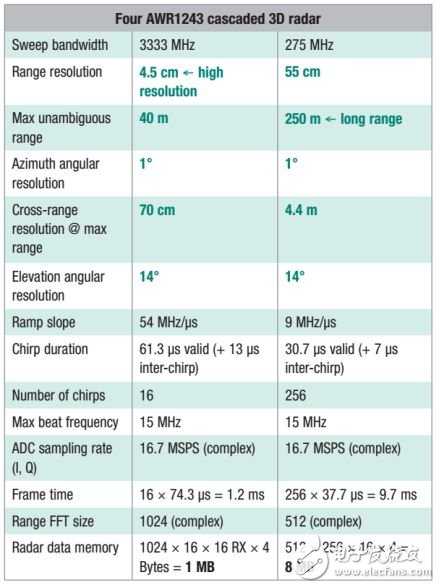
上表为德州仪器4个AWR1243级联后雷达的参数,远距离分辨力大大提高,40米处可以做到1度的方位角分辨率,也就是4.5厘米的精度和大约9厘米的物体分离精度。如果是百万像素45度FOV的摄像头,那么40米处只有大约20像素的方位角分辨率,无法分清行人和骑行者。MIMO具备很宽的FOV,像德州仪器这种4个级联的雷达FOV高达192度。而摄像头的话80度的FOV 都算是广角了,边缘处可能有广角失真。
一对发射阵元和接收阵元可以虚拟出一个收发阵元,则对于M发N收的MIMO雷达 ,发射阵元和接收阵元共有M* N对 ,即可以虚拟出 M *N个收发阵元 ,其个数一般是远远大于N的,从而实现了阵列孔径的扩展 。
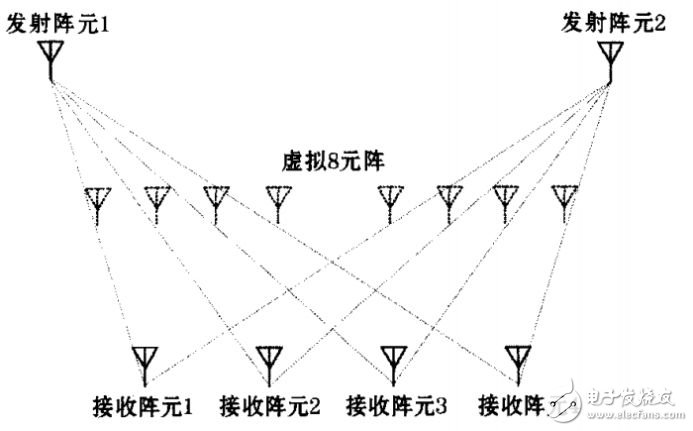
德州仪器使用4个3发4收的AWR1243雷达,就是192个虚拟通道(天线或者叫阵列)。
摄像头应用
在自主导航局部路径规划方面,根据通用的描述,通用似乎是使用了自由空间(Free Space)法,这是通用与百度和谷歌最大的区别,百度和谷歌都使用栅格法。栅格法是目前应用最广泛,可靠性最高的一种局部路径规划。它是由w.E.Howden在1968年提出的。栅格法将机器人工作环境分解成一系列具有二值信息的网格单元,工作空间中障碍物的位置和大小一致,并且在机器人运动过程中,障碍物的位置和大小不发生变化。用尺寸相同的栅格对机器人的二维工作空间进行划分,栅格的大小以机器人自身的尺寸为准。若某个栅格范围内不含任何障碍物,则称此栅格为自由栅格;反之,称为障碍栅格。自由空间和障碍物均可表示为栅格块的集成。栅格的标识方法有两种:直角坐标法和序号法。多采用四叉树或八叉树表示工作环境,并通过优化算法完成路径搜索。该方法以栅格为单位记录环境信息,栅格粒度越小,障碍物的表示越精确,但同时会占用大量的存储空问,算法的搜索范围将按指数增加,会大量消耗运算资源。 这种方法一般都配合64线机械旋转激光雷达,线数越高就可以划分粒度越小。所以会出现128线激光雷达和苹果那种12个16线激光雷达,未来可能还有256线激光雷达。整体成本太高是栅格法主要缺点。
自由空间法采用预先定义的如广义锥形和凸多边形等基本形状构造自由空间,并将自由空间表示为连通图,通过搜索连通图来进行路径规划。自由空间的构造方法是:从障碍物的一个顶点开始,依次作其它顶点的链接线,删除不必要的链接线,使得链接线与障碍物边界所围成的每一个自由空间都是面积最大的凸多边形:连接各链接线的中点形成的网络图即为机器人可自由运动的路线。其优点是比较灵活,起始点和目标点的改变不会造成连通图的重构,缺点是复杂程度与障碍物的多少成正比,且有时无法获得最短路径。自由空间法的分割需构造想象边界,想象边界本身具有任意性,于是导致路径的不确定性。
自由空间法优点是不需要使用高线激光雷达,单目即可,对运算资源消耗也小,缺点是可靠性不高,有时无法得出路径规划,会出现暂时的停滞,或者会绕路,最重要一点是对光线非常敏感,在阳光下的林荫道,阳光直射摄像头,低照度环境,雨雪雾天无法使用。通用用激光雷达弥补了部分缺点,同时在摄像头周边加上了红外LED,增加对低照度环境适应能力。同时有效距离也比较近,车速通常无法高于每小时100公里。英特尔与Mobileye阵营对这种方法比较青睐。
通用车标处的摄像头应该是主摄像头,很有可能使用了索尼的IMX390CQV传感器,这是一款1/2.7的CMOS感光元件,有效画素是245万,是目前像素最高的车载图像传感器,索尼在2017年10月发布的IMX324图像传感器性能更好,是目前全球公认性能最佳,有效距离(误差低于5%的距离)最远的图像传感器,但在2017年底才有样品提供,相信通用暂时无缘使用。IMX324 是一款1/1.7-type的CMOS图像传感器,配备了742万行业最高有效分辨率的RCCC滤镜,在FOV 32°镜头的帮助下能够拍摄距离摄像头160米远的路标,这是专为EyeQ4和 EyeQ5开发的传感器,价格极高。不过即便是在窄镜头(35度以下已经属于窄视角,通常汽车的前视镜头是45度)下,有效距离也只有160米,如果是45度,有效距离是150米。而IMX390配合45度视角镜头,估计有效距离是65-75米。而64线激光雷达可以做到200米。不过电动车在市区的速度不高。

通用的双目摄像头基线距离大约8厘米,有效距离很短,估计只有10-12米,应该主要用来识别行人和骑车人。利用双目快速识别行人和骑车人,奔驰和宝马已经在车上大量使用,是一项比较成熟的技术。这项技术当然和深度学习无关,深度学习最大的缺点就是消耗大量运算资源,效率低下,比较慢。
这种技术称为stixels,sticks above the ground in the image。指对图片中地面以上的柱状物体进行建模,显然,图像中的树木,人,海报之类的物体都可谓柱状物。
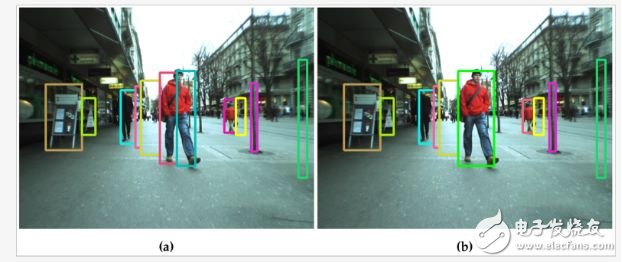
这里所谓的stixels深度信息的底部,就是地面,顶部,就是行人的头顶可能出现的大概位置。对于图像中的每一列而言,底部像素,顶部像素,以及未分类物体之间的距离都被估算出来。这种方法的关键在于,利用stereo image可以直接计算出stixel,而无需计算所有的深度信息。在进行行人检测时,对图像中的地面和stixel进行估计,并设置stixel的高度为1.75m,在2010年就可在CPU上可以达到135fps的速度。而深度学习能做到30fps就需要GTX1080级显卡了。Stixels的速度至少是深度学习的20倍以上。
车顶上的8个摄像头是一套冗余设施,即使激光雷达和毫米波雷达都失效,车辆周围的360度全景视频依然可以得到。车内后视镜处的单目也是一套冗余系统,就是L2级的AEB紧急刹车系统。
计算单元和其他
和谷歌无人车一样,通用的无人车也使用两套计算平台,保证一套失效,另一套可以无间断接替其运行。计算平台位于后备箱里,同时也有两套供电系统,主电源通过电动车本身的电池转换为高压供应。注意,通用用了高压这个词,如果是英伟达的DRIVE PX2或其他车载专用计算平台,那么应该是3到5.5伏的低压,所以推测通用没有使用英伟达的运算平台或其他车载专用计算平台,而是很有可能使用了工控机,通常工控机的输入电压是直流24伏,相对5.5伏或车内常见的12伏可以算高压了。如果主电源失效,则启动备份电源。备份电源将供应所有传感器单元,执行器和运算单元。
通用无人车的首席工程师Andrew Farah透露第一代无人车的备份电源功率高达3千瓦。要知道第一代无人车只用了两个32线激光类、不超过10个毫米波雷达,不超过5个摄像头。但是Andrew Farah未透露最新一代无人车也就是第四代无人车后备电源的功率,不过他坚称功率降低了,估计可能还要达到2千瓦。可以肯定这款电动车的续航要因此减少。
百度则是双管齐下,一台是工控机(使用的是 Neousys Nuvo-6108GC,这是一款性能强大的 X86 解构工业控制计算机);另一台则是英伟达用于自动驾驶的 Drive PX2。

Nuvo-6108GC是台湾宸曜科技的工控机,采用华硕GTX 1080 GPU显卡,英特尔双至强E5-2658 V3 12核CPU,1TB 2.5寸7200转SATA硬盘(节约点啊,不用固态)。
推测通用把主要精力都用在算法和传感器上了,运算平台没有花费多少精力,未来肯定会用低功耗的嵌入式系统来代替,最有可能是两片或四片瑞萨的R-CAR H3并联使用,R-CAR H3是目前全球运算性能最强的车规级SoC。届时成本可以大幅度降低。
通用无人车的其他部分,电池,电机和电控部分都由韩国LG供应,制动执行器是博世的第二代iBooster,ESP也是博世的,转向系统可能是中航集团旗下的耐世特NEXTEER供应,摄像模组可能由加拿大麦格纳提供。
摩根士丹利的分析师预计通用Bolt无人车的成本高达25-30万美元,我预计可能没有那么高,但至少也是15万美元。显然这不可能针对普通消费者市场。只有出租车、共享出行或网约车市场对车购置成本敏感度不高,对人工成本敏感度很高的领域才是无人车的主要市场。
综合来看,通用无人车的技术水平仍然低于谷歌,甚至低于百度,但是通用的商业化进程会远比谷歌和百度要快。传统车企与IT类企业在无人车领域的技术差距是快速缩小,而传统车企的商业化进程只要下定决心,是要比IT类企业快得多。

上图为丰田第三代无人车,用四个固态激光雷达取代了原先车顶的64线机械旋转激光雷达。
上图是丰田无人车的计算单元,可以看到非常小巧,完成度极高。这是技术最先进完成度最高的无人车,远高于谷歌。传统汽车巨头一旦发力无人车,IT类企业将不再具有优势。
技术专区
- TIDA-01421用于无传感器位置测量的脉冲计数器参考设计
- 传特斯拉明年11月生产ModelY_与Model3同一平台
- TLE9842-2QX主要特性_PCB设计图
- CMU机器人研究所_无人驾驶上路测试牌照Gatik.AI
- DRV10983-Q1主要特性_功能框图




