



0 引言
航标是航行标志的简称,是指示航道方向、界限与碍航物的标志,为船舶的安全航行提供了基本保障。航标终端通过测量航标灯工作状态(电压、电流、可用灯泡数、闪光周期、位置信息等参数),再将这些状态信息以数据报的形式在CPU的控制下通过公共通讯网发送回航标监控中心。同时,监控中心也可以对航标进行远程遥控。这样,就能使得当代的航道建设趋于数字化、信息化。
1.系统总体设计
航标终端需要测量和控制的对象参数主要有电压、电流、灯质、日光值等,既有模拟量又有数字量。终端必须是一个电源适应能力强、抗干扰能力强、功耗低、集成模数转换的SOC(System On Chip)系统。本航标终端采用主、从双CPU结构。系统主控制器采用NXP(恩智浦)公司的32位Cortex-M3内核嵌入式微处理器 LPC1769,负责与监控中心的GPRS/GSM通信、GPS信号的读取与前差分处理、本地数据的存储、RS-232/485扩展通信、模拟量检测、与从CPU通信及系统远程升级等工作,并预留其他通信接口;从CPU采用NXP公司的32位Cortex-M0内核嵌入式微处理器LPC1114,负责灯质、倾角/撞击和环境温度等参数的检测并预留其他通信接口。基于ARM的航标终端系统框架如图1示。

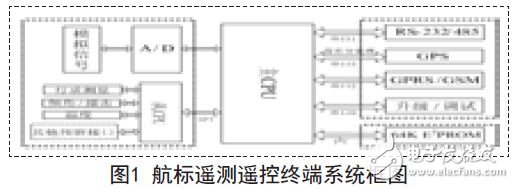
图1中,A/D用于检测电压和电流;从CPU负责灯质、倾角/撞击、温度的测量及预留接口;64K E2PROM保存配置数据、历史数据等;串口0用于在系统升级和调试,串口2用于GPRS/GSM模块通讯,串口3用于GPS数据的通讯,串口1用于提供一个RS-232/485接口,和其他外设通讯。
2.主要模块硬件电路设计
2.1 A/D测量电路
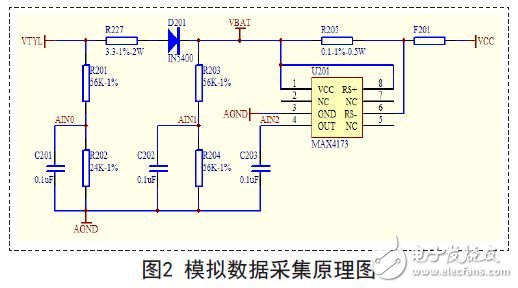
模拟量测量包括航标灯、电池、太阳能板等的电压、电流。电压直接通过滤波电路送入A/D转换器进行处理。电流的测量则通过电流传感器将电流转换成电压量并滤波后送入A/D转换器。电路如图2所示。
2.2 电源控制
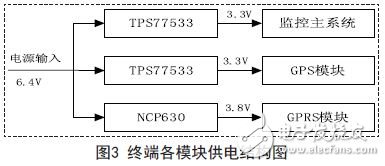
电源设计上采用3片高效率、低压差的线性稳压电源(LDO)分时工作来实现系统电源的高效管理。其中,监控主系统和GPS各采用一片TPS77533供电,把航标灯电池上6.4V的电压降到监控系统所需要的3.3V电压。TPS77533是美国TI公司生产的一款高效率、低压差线性稳压集成电路,具有外围电路简单、电压转换效率高(最高可达92%)、输入电压范围宽、使用稳定可靠等特点,适用于绝大多数工作电压范围的航标灯的使用。由于通信模块在 GPRS发射时的瞬间电流可高达2A/3.8V,因此,为了提高系统的稳定性,防止各模块之间的影响和干扰,本系统采用一片大功率的线性稳压电源 NCP630对GPRS模块单独供电,配合大电容蓄能滤波电路(多个电容并联实现)方式,给GPRS提供充足的能量。NCP630是安森美公司的一款大电流、高效率、低压差线性稳压集成电路,其最大输出电流可达3A,最高电压转换效率90%,配合多个大电容的并联,可以给GPRS模块提供充足的能量,保证在GPRS的发射瞬间不会因电流过大而拉低模块电压,导致GPRS工作不稳定。电源控制电路的结构图如图3所示。
技术专区
- 裸机程序如何驱动硬件?看前辈是怎么说的
- ARM紧耦合内存简介及配置
- ARMv8 通过设计简化软件移植详解
- STM32中断优先级谁更高 主要根据两个方面来判断
- 基于ARM与DSP的主从式双CPU嵌入式四轴运动控制器设计方案




