



方波驱动的无刷直流电机由于力矩大,运行可靠,在电动车控制器中广泛应用,方波驱动最大的缺点在于换相时的电流突变引起的转矩脉动,导致噪声较大,但好的控制策略可以大大改善换相噪声。电动车控制器设计的难点在于电流控制,本文就电动车控制器设计的一些关键地方加以描述。
1.概述
电动自行车上使用的电机普遍采用永磁直流电机。所谓永磁电机,是指电机线圈采用永磁体激磁,不采用线圈激磁的方式。这样就省去了激磁线圈工作时消耗的电能,提高了电机机电转换效率,这对使用车载有限能源的电动车来讲,可以降低行驶电流,延长续行里程。
永磁直流电机按照电机的通电形式来分,可分为有刷电机和无刷电机两大类,有刷电机由于采用机械换相装置导致可靠性和寿命降低,因此逐渐退出电动车市场。
无刷电机又可分为有传感器和无传感器两类,对于无位置传感器的无刷电机,必须要先将车用脚蹬起来,等电机具有一定的旋转速度以后,控制器才能识别到无刷电机的相位,然后控制器才能对电机供电。由于无位置传感器无刷电机不能实现零速度启动,所以现在生产的电动车上用得较少。目前电动车行业内使用的无刷电机,普遍采用有位置传感器无刷电机。
有位置传感器永磁直流无刷电机按照内部传感器的安装位置不同,又可分为60度电机和120度电机。在120°的霍尔信号中,不可能出现二进制000和111的编码,所以在一定程度上避免了因霍尔零件故障而导致的误操作。因为霍尔组件是开漏输出,高电平依靠电路上的上拉电阻提供,一旦霍尔零件断电,霍尔信号输出就是111.一旦霍尔零件短路,霍尔信号输出就是000,而60°的霍尔信号在正常工作时这两种信号均会出现,所以一定程度上影响了软件判断故障的准确率。因此目前市面马达已经逐渐舍弃60°相位的霍尔排列。
2.永磁直流电机基本原理
2.1.主回路电路

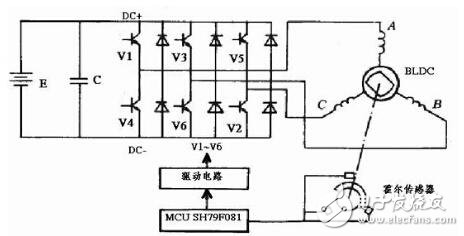
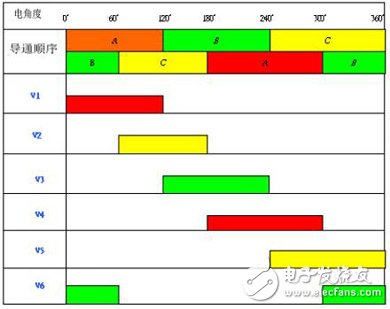
图中ABC表示电机的3相绕组,采用星形接法,V1~V6表示功率场效应管,如果将V1~V6用如下的时序波形驱动,则3相绕组会按照AB-AC-BC-BA-CA-CB顺序通电(AB表示电流由A相流向B相),产生一个旋转的磁场,牵引外转子(永磁体)旋转。
导通顺序
技术专区
- 嵌入式视频通信的兴起:视频应用程序趋势良好
- 工程师分享的嵌入式系统在传感器上运用的技巧
- ARM芯片基于linux嵌入式操作系统实现的CMU控制器方案
- 探讨基于sopc技术的fpga集成嵌入式系统设计
- 几款经典的嵌入式系统方案推荐




