四轴飞行器又称四旋翼飞行器、四旋翼直升机,简称四轴、四旋翼。这四轴飞行器(Quadrotor)是一种多旋翼飞行器。四轴飞行器的四个螺旋桨都是电机直连的简单机构,十字形的布局允许飞行器通过改变电机转速获得旋转机身的力,从而调整自身姿态。具体的技术细节在“基本运动原理”中讲述。因为它固有的复杂性,历史上从未有大型的商用四轴飞行器。近年来得益于微机电控制技术的发展,稳定的四轴飞行器得到了广泛的关注,应用前景十分可观。


小型的四轴飞行器可以自由地实现悬停和空间中的自由移动,具有很大的灵活性。此外,因为它结构简单,机械稳定性好,所以成本低廉、性价比很高。主要的应用是玩具、航模,以及航拍,新的应用也在不断的拓展之中。
四轴飞行器组成
四轴飞行器由电机、电调、桨、机架、电池、充电器、遥控器、飞控板等部件组成。
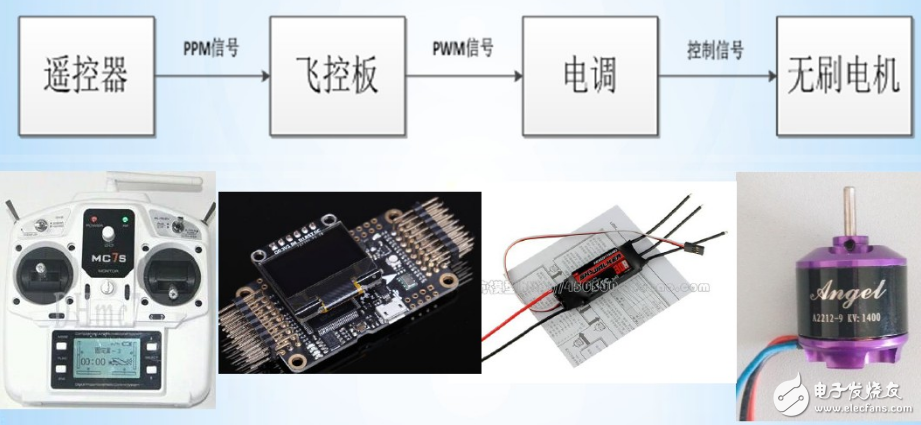
飞控板
飞行控制器(飞控)是飞行器的大脑,飞控板上配置有中央处理器、姿态测量传感器、无线接收器等器件,飞控板完成自身稳定的飞行,并且它还要从接收器接受信号,并把信号传输给电调告诉它如何飞行,其中最困难的在于如何保持飞行器飞行的稳定性。为了保持稳定性,飞控板就需要各种各样的传感器完成自身的姿态解算并控制四个电机的输出动力,使自身保持稳定。
电调
电调的作用就是将飞控板的控制信号,转变为电流的大小,以控制电机的转速。因为电机的电流是很大的,通常每个电机正常工作时,平均有3A左右的电流,如果没有电调的存在,飞控板根本无法承受这样大的电流(另外也没驱动无刷电机的功能)。同时电调的BEC输出功能在四轴当中还充当了电压变化器的作用,将11.1v的电压变为5v为飞控板和遥控接收机供电。在四轴上,4个电调的正负极需要并联(红色连一起,黑色连一起),并接到电池的正负极上;电调3根黑色的电机控制线用于连接电机。
正反桨
四轴飞行为了抵消螺旋桨的自旋,相隔的桨旋转方向是不一样的,所以需要正反桨。正反桨的风都向下吹。适合顺时针旋转的叫正浆、适合逆时针旋转的是反浆。安装的时候,一定记得无论正反桨,有字的一面是向上的(桨叶圆润的一面要和电机旋转方向一致)。
四轴飞行器自动控制原理
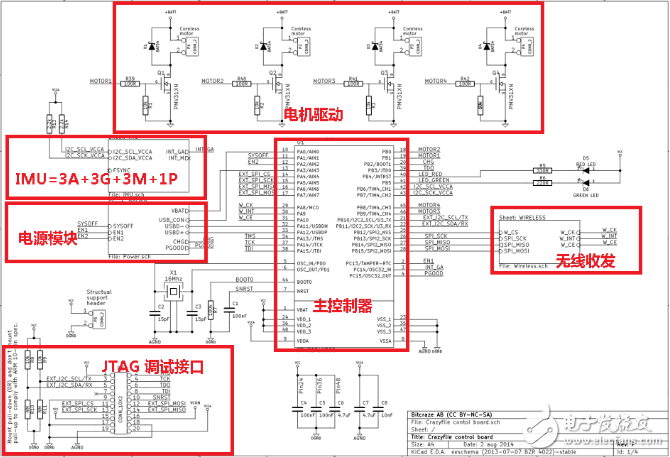 电路图
电路图
典型的传统直升机配备有一个主转子和一个尾浆。他们是通过控制舵机来改变螺旋桨的桨距角,从而控制直升机的姿态和位置。四旋翼飞行器与此不同,是通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。由于飞行器是通过改变旋翼转速实现升力变化,这样会导致其动力不稳定,所以需要一种能够长期确保稳定的控制方法。四旋翼飞行器是一种六自由度的垂直起降机,因此非常适合静态和准静态条件下飞行。但是四旋翼飞行器只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
为了保持飞行器的稳定飞行,在四轴飞行器上装有3个方向的陀螺仪和3轴加速度传感器组成惯性导航模块,可以计算出飞行器此时相对地面的姿态以及加速度、角速度。飞行控制器通过算法计算保持运动状态时所需的旋转力和升力,通过电子调控器来保证电机输出合适的力。
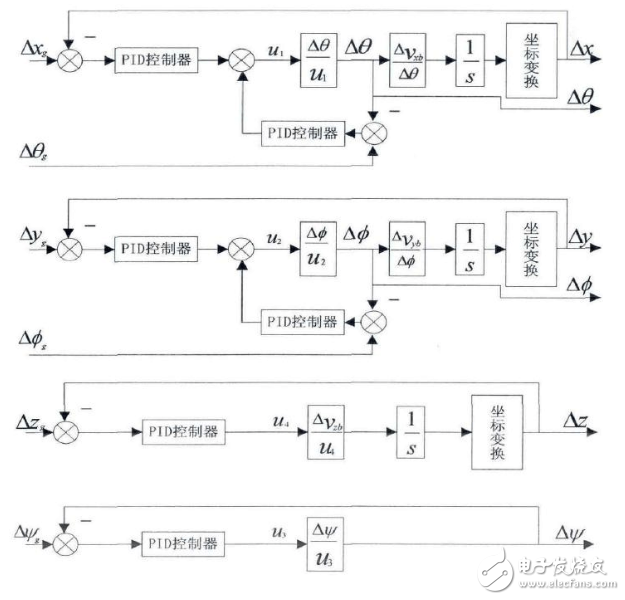 控制系统结构框图
控制系统结构框图
技术专区
- Alexa语音服务软件扩展STM32Cube
- 结合DNN API驱动未来神经网络应用的解决方案
- 针对于高端移动通信和汽车市场的四集群设计
- 一款基于帧捕捉的开源图形调试器应用设计
- 即将成为标准配置的最新安全技术:后视摄像系统




