



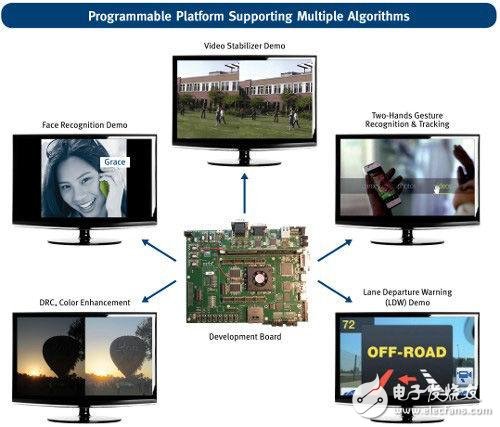
计算机视觉(Computer Vision,CV)正在现实活动中经历着巨大的激增,应用范围从使用手势控制电视到可提醒驾驶员汽车偏离车道的汽车。你们中的很多人可能关注着在CEVA-MM3000系列上实施复杂算法的项目,该系列是用于计算机视觉应用的最高性能可编程平台。
不过,此类高级计算密集型算法依赖于复杂的低级模块来实现快速上市,没有时间从低级代码开始编写算法,对此仅有一个解决方案:OpenCV。

OpenCV程序库是开放源(open-source)程序集合,通常在计算机视觉算法中使用,它支持更高级别的代码,不仅可以更快地进入市场,而且可以更干净和更简便地进行维护和修改——这在快速算法发展中是很重要的。并且当程序库针对用户平台优化之后,用户可以快速实现最快的性能。
这就是为什么CEVA最近推出CEVA-CV:为在CEVA-MM3101上实现最佳性能而进行超过500项OpenCV功能调整。优化的功能对于一系列流行应用是至关重要的,包括:
●移动计算、电脑和智能电视
●先进驾驶辅助系统(Advanced Driver Assist Systems,ADAS):改进驾驶安全性的技术;
●自然用户接口(Natural User Interfaces,NUI):丰富互动体验的技术,比如手势、脸和情绪识别技术;
●计算摄影学:图像增强,将低品质图像结合到高品质效果中;
●工业视觉:通过先进的视觉功能来增强工业机器和机器人;
●监视:准确而可靠地识别和追踪物体;
某些移植功能是基本的,比如直方图、过滤器和仿射变换;其它则代表了复杂的功能,比如用于象限检测的FAST算法、用于数据相关的RANSAC、连通分量的识别,以及用于污点检测(blob detecTIon)的MSER.
将CEVA-CV用于CEVA-MM3101是极其有效的,因为CEVA-MM3101架构是专门为计算机视觉设计的。已经先后完成了参考设计和架构设计,以确保实际代码驱动平台设计决策。这实现了两个目标:通过尽可能少的代码行进行工作来达到高性能,通过较低的工作频率和先进节能特性,如功率调节单元(Power Scaling Unit,PSU)来实现低功率。
通过平台设计进一步实现每指令工作(work-per-instrucTIon)最大化,提供:
●传统单指令多数据(Single-InstrucTIon-MulTIple-Data,SIMD)指令,允许立即在32位或64位上运行
●超长指令字(Very-Long-Word Instructions,VLIW),允许将多达六个独立运算打包在单指令中;并且
●矢量运算——本质上为增强的SIMD,允许进行128位或256位数据运算
一家大举进入ADAS领域的公司是iOnRoad,该公司已与CEVA合作,已经实现了驾驶辅助、碰撞警报和智能手机中的“黑匣子”视频记录。
技术专区
- 浅嵌入式网络摄像机的设计方案
- openstack的放弃之路
- 面向AWorks框架管理文件的方法和数据结构
- YOLO的核心思想及YOLO的实现细节
- CPU寄存器详解




