



本文介绍了Linux设备驱动程序的类型和文件操作接口函数,以及驱动程序的基本开发过程。以ARM9为平台,基于Linux2.6.30开发DS18B20的驱动程序,以模块的形式加载到内核,最后通过应用层调用驱动程序,获得温度数据。
引言
随着嵌入式技术的发展,基于ARM和Linux的嵌入式产品越来越多,DS18B20温度采集传感器在工业和生活上应用广泛,研究开发基于ARM9和Linux的DS18B20的驱动程序可以满足大部分温度采集平台的应用。
1 Linux设备驱动的开发过程
Linux操作系统通过各种驱动程序来操作硬件设备,它屏蔽了各种设备,设备驱动程序是操作系统内核和硬件之间的接口。从应用程序来看,硬件只是一个设备文件,应用程序可以像操作普通文件一样操作硬件设备。
1.1设备的分类
Linux看待设备可区分为3种基本设备类型,分别为字符设备、块设备和网络设备:
①字符设备:字符设备是一种可以当作一个字节流来存取的设备,相当于一个文件,字符设备驱动通常实现open、close、read和write系统调用;②块设备:如同字符设备,块设备通过位于/dev目录的文件系统结点来存取,块设备驱动程序主要通过传输固定大小的随机数据来访问设备,块设备驱动程序是核心内存与其他存储介质之间的管道;③网络设备:网络接口和一个已经挂载的块设备类似,网络接口使用特定的内核数据结构注册,与外界进行数据交换时调用,与块设备只响应来自内核的请求不同,Linux内核的网络子系统被设计成完全与协议无关,网络驱动程序异步地接收来自外界的数据包。
1.2字符设备开发过程
本项目开发的驱动程序都是字符设备驱动程序,因此简单介绍字符设备的开发过程。
1.2.1重要的文件操作
接口函数file_operaTIon file_operaTIon是一个字符驱动如何建立底层驱动与应用程序连接的结构体,包含以下重要的函数接口:
①int(*open)(struct inode*,struct file*):打开设备操作。
②ssize_t(*read)(struct file*,char__user*,size_t,loff_t*):从设备中获取数据,非负返回值代表成功读取的字节数。
③ssize_t(*write)(struct file*,const char__user*,size_t,loff_t*):发送数据给设备,非负返回值代表成功写入的字节数。
④int(* ioctl)(struct inode*,struct file*,unsigned int,unsigned long):系统调用提供了发出设备特定命令的方法。
1.2.2设备打开与关闭
open方法在应用程序调用open()系统调用时被调用,作用是打开设备;release方法在应用程序调用close()系统调用时被调用,作用是关闭设备。
1.2.3驱动程序与应用程序交换
数据交换的方式最直接的方法是在struct file_operaTIon中的read/write方法中与用户空间的buffer进行数据的交换:unsigned long copy_to_user(void__user*to,const void*from,unsigned long count):从内核空间拷贝数据到用户空间;unsigned long copy_from_user(void*to,const void__user*from,unsigned long count):从用户空间拷贝数据到内核空间;1.2.4设备控制ioctl设备控制接口如下:①应用程序调用接口:int ioctl(int fd,unsigned longcmd,…):②设备驱动的相应接口:int(*ioctl)(struct inode*inode,struct file*filp,unsigned int cmd,unsigned long arg)。
应用程序通过ioctl发送命令,从而调用驱动接口的ioctl.因此,在Linux字符设备驱动程序中主要实现open、read、write和ioctl函数分别对应Linux系统调用的open、read、write和ioctl来完成数据交互和设备操作。
2温度传感器驱动软件设计
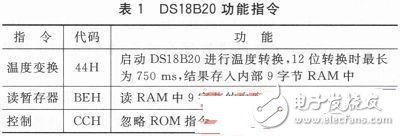
DS18B20采用独特的单总线接口方式,每只DS18B20都有一个唯一存储在ROM中的64位编码。最前面8位是单线系列编码:28H,接着的48位是一个唯一的序列号,最后8位是以上56位的CRC编码。通过单线总线端口访问DS18B20的协议如下:①初始化;②发送ROM操作指令;③发送DS18B20功能指令。
主要功能指令,如表1所列。

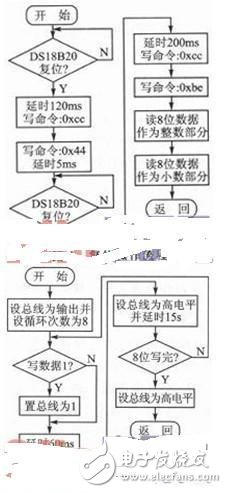
根据DS18B20的读写协议以及操作指令和功能指令,可以得出DS18B20的复位过程如图1所示,写操作流程如图2所示,读操作流程如图3所示。
根据DS18B20复位、读写操作过程,利用Linux编写DS18B20驱动程序。过程描述如下。
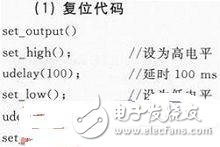
(1)复位操作流程
①设总线为输出模式;②向总线发送一个上升沿,保持高电平100 ms;③向总线发送一个下降沿,保持低电平800 ms;④向总线发送一个上升沿,延时100 ms;⑤设总线为输入模式;⑥判断总线状态,如果为低电平,则复位成功。
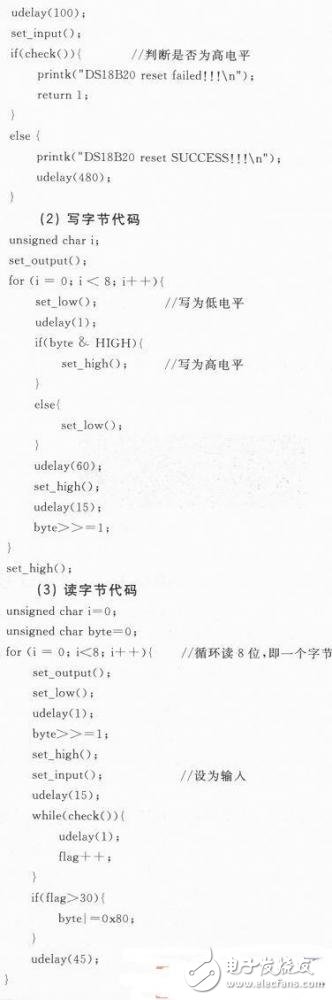
(2)写操作流程
①设总线为输出模式,并设置8次循环;②向总线发送一个下降沿,保持低电平;③判断写入数据是0还是1,如果是1,则向总线发送一个上升沿,保持高电平;如果是0,则保持总线低电平不变;④延时60 ms,设总线为高电平,再延时15 ms;⑤循环操作步骤②~④;⑥设总线为高电平。
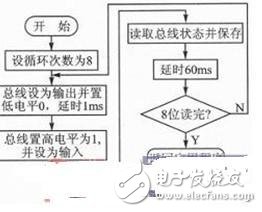
(3)读操作流程
①设循环次数为8;②设总线为输出,向总线发送一个下降沿,保持低电平,并延时1 ms;③向总线发送一个上升沿,并设为输入;④读总线状态,并保存为1位,并延时60 ms;⑤循环操作步骤②~④,读取1个字节数据。
(4)温度读写过程
①循环判断DS18B20直到复位,延时120ms;②写入CCH命令,跳过读序列号过程;③写入44H命令,开始温度转换,延时5 ms;④循环判断DS18B20直到复位,延时200 ms;⑤写入CCH命令,跳过读序列号过程;⑥写入BEH命令,读取寄存器;⑦读温度整数部分;⑧读温度小数部分。
(5)驱动程序编写
选定S3C2440一个GPIO引脚作为连接DS18B20的数据线,经过查电路图和S3C2440的芯片手册,选择GPF3为连接引脚;主要对GPF的控制寄存器GPFCON和数据寄存器GPFDAT进行操作,GPF3主要对应GPFCON第6位和第7位,以及GPFDAT的第3位进行操作;对GPFCON[7:6]设00为输人,设01为输出;GPFDAT[3]设为输入时,相应的位即为引脚的状态,设为输出则可以对引脚进行置1和置0操作;结合S3C2440的寄存器GPFCON和GPFDAT,以及DS18B20时序,可以利用C语言编写Linux下驱动程序,本驱动程序采用实现read接口函数的字符设备驱动。
3部分代码

技术专区
- LinkDevelop平台是物联网生态的底层支撑
- 网友回复一波流,玩刺激战场骁龙660和麒麟960怎么选?
- 基于Linux2.6.30开发DS18B20的驱动程序的类型和文件操作接口函数详
- 通过WEBENCH WebTHERM PCB 编辑器实现散热仿真
- 利用深入洞察分析来测试软件




