



随着信息技术的发展,网络通信、信息安全和信息家电产品的普及,嵌入式MCU正是所有这些信息产品中必不可少的部件。目前国内一些科研院校和半导体公司都在致力于研发自主设计的嵌入式,这对我国的半导体产业、电子产品产业的发展具有重要意义。
这里描述了一款自主研发的16位嵌入式微控制器的设计与实现,基于RTL级设计方法使用VerilogHDL进行设计描述,在设计中,采用硬布线控制方式,减少了面积和功耗,同时MCU兼容了MSC-96指令集,目标是可以应用于实际嵌入式系统项目中。
1 总体设计
1.1 MSC-96体系结构
图1所示为MSC-96体系结构。Intel 8096微控制器是由通用寄存器阵列、算术逻辑单元(RALU)和微程序控制器等模块组成。其采用的是微程序控制方式,需要使用一个片内ROM存储器,因而会造成面积和功耗都会较大。

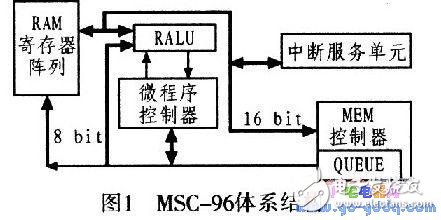
MCU内部的寄存器阵列通过一个控制器和2条总线与RALU相连。这两条总线是8位的A-BUS和16位的D-BUS。DBUS只用于RALU与寄存器之间的数据传输,而A-BUS用作上述传输过程中的地址总线。当MCU通过寄存器控制器访问片内外寄存器时,A-BUS可作为多路转换的地址/数据总线。
1.2 A8096总体结构
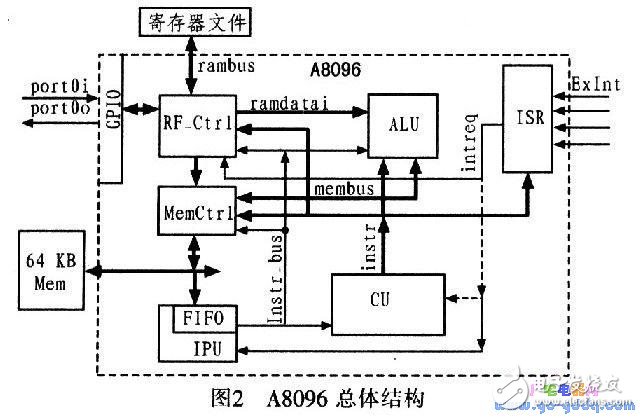
为了减少面积和功耗,A8096采用硬布线逻辑控制方式取代上述的微程序控制器。依据MSC-96的体系结构,A8096主要功能模块包括:IPU(InSTructiON Pre-fetch Unit。指令预取单元)、CU(Control Unit,控制单元)、ALU(ArithmeTIC Logical Unit,算术逻辑单元)、MEM_C-TRL(MEM控制器)、RF_CTRL(寄存器堆控制器)、ISR(Interrupt Service RouTIne unit,中断服务单元)、GPIO(General Purpose Input Out-put,通用输入输出单元)等主要功能部件。其结构如图2所示。
1.3 系统总线
A8096采用3条总线:一条是MEM总线,用于IPU和MEM CTRL对程序空间和数据空间的读写控制;16 bit的数据线,16 bit的地址线,读写信号memrd/memwr;一条是内部寄存器阵列(Register File)总线,用于RF_CTRL对内部寄存器阵列的读写访问,地址线是8 bit的,数据线为16 bit,读写信号为rf_rd/rf_wr;一条是SFR总线,用于访问数据空间地址在00H~19H的特殊定义的寄存器空间。8 bit的地址总线,16bit的数据总线,读写信号sfrrd/sfrwr。另外IPU和MEMCTR的数据交互是通过8 bit的数据线instr_bus完成的,其作用是从预取指令队列中将指令传给CU单元等。
2 MCU设计与实现
2.1 MCU工作原理
A8096通过IPU(指令预取单元)指令预取,并存放在预取指令队列中,CU(控制单元)从IPU指令队列中取指并进行译码,产生控制时序等信号。ALU单元、RAM控制器、MEM控制器等部件中均有译码模块,依据当前指令和当前指令周期主动工作。如:RAM控制器在加法指令的相应周期取操作数送往ALU单元,ALU在相应周期接收数据,然后进行运算并将结果输出。
2.2 MCU启动过程
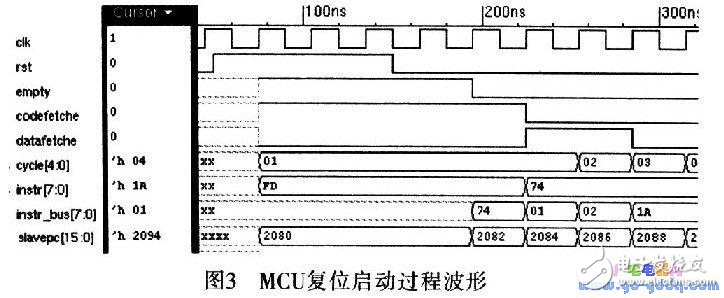
在上电复位时,MCU处于复位态(rst信号有效)。复位时,IPU单元中的指令队列清空(empty信号有效),总线处于空闲态,IPU立刻进行指令预取动作,程序空间的首地址(2080H)指令即被取人指令队列,随后队列空信号(empty)无效,同时指令被发送出去(instr_bus)。在复位同时,控制单元(CU)的取指信号(codefetche)即一直有效,在指令队列空信号empty无效后(在empty无效之前CU一直等待),指令即通过instr_ bus进入了CU,指令操作码被存入了指令寄存器,如图3中instr寄存器更新为加法指令的操作码74。至此,MCU完成了复位、自动取指操作,并开始往下执行该指令,IPU单元也会继续进行指令预取操作。
2.3 指令执行过程
在A8096中,有两级指令预取概念:一级是指令预单元IPU利用总线空闲从程序空间不断预取指令存入指令队列中;一级则是指令执行过程中的指令预取,当一条指令执行到最后一个时钟周期时,CU单元就会发送取指信号,进行指令执行级的预取指动作,下一条指令的操作码即被预取出来(指令队列为空时需等待),并立刻进行译码确定指令的字节长度和指令执行周期数。
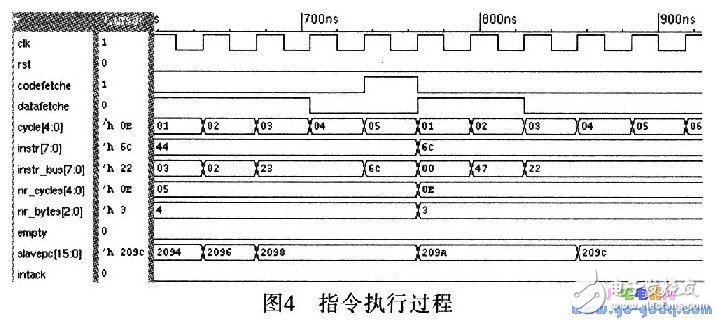
如图4所示,在加法指令的最后一个周期(cycle=05),CU单元取指信号codefetche有效,则下一条指令的操作码(6C,乘法操作码)被预取出来,同时进行查表译码确定其指令字节长度和指令周期数,随后操作码被存入指令寄存器instr中(此时,指令周期计数器cycle又从01开始计数)。后面乘法指令的操作数也会不断被取进来执行,直到乘法指令最后一个周期时,又将下一条指令的操作码预取进来。
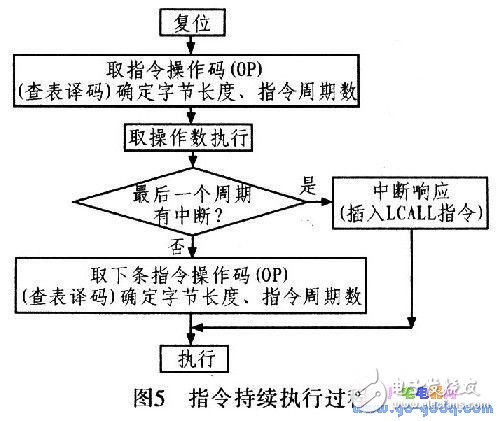
需要说明:codefetche为取操作码信号,datafetche为取操作数信号。在指令最后一个周期时若有中断请求,则插入LCALL指令进行中断处理,读取下一条指令。其流程如图5所示。
2.4 指令译码过程
在MCU设计过程中,首先完成对各条指令的指令分析工作,确定每个周期该做的动作,然后各部件依据指令分析表进行相关的指令译码(RAM控制器只译RAM要做的动作,ALU只译ALU要做的动作)。过程描述如下:在预取操作码时,CU单元对操作码进行译码确定指令的字节长度(nr_bytes)和指令周期数(nr_cycles)。然后CU依据指令字节长度(nr_bytes)取操作数,其他部件依据指令和当前指令周期(curcycle)执行相应的指令操作。表1为加法指令分析表,下面以加法指令的译码过程来说明整个译码流程:
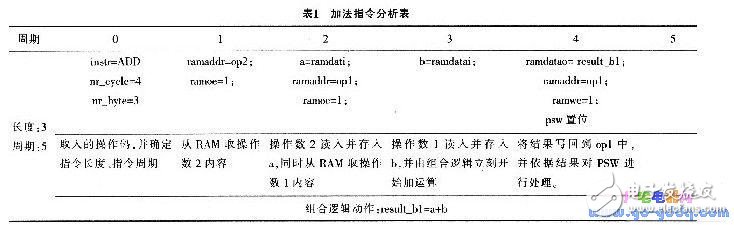
1)加法指令 ADD OPl OP2(将OPl+0P2结果写入OPl中);其目标码格式为:ADD OP2 OPl,其中OPl和OP2均为操作数地址。
2)0周期 实际指上一条指令的最后一个时钟周期,此周期codefetche取指信号有效,IPU单元将指令送入CU单元确定了指令周期和指令长度。
3)l周期 取操作数信号datafetche有效,op2(地址)进来,被送入RAM地址线,发读信号(从RAM寄存器阵列取操作数2)。
4)2周期 操作数2被取入,并存入ALU中的a寄存器;此周期取操作数信号datafetche有效,opl(地址)进来,被送入RAM地址线,发读信号。
5)3周期 操作数l被取入,并存入ALU中的b寄存器;加法器立刻进行a+b运算。
*周期 将加法结果放到RAM数据线上,地址线=opl,发写信号。将加法结果写回到opl中,并依据结果对PSW进行处理。
7)5周期 无动作,用于写回操作的过程。
3 验证结果
3.1 仿真验证
芯片的功能与结构设计,只是设计流程的一部分,为保证最终设计成功,必须对其全面仿真与功能验证。对MCU的测试方法如下:1)功能模块的单元测试,验证模块的功能正确性,包括接口时序等。2)系统集成测试,首先编写简单的机器码测试向量进行初步调试:然后使用编译器写汇编程序,编译成二进制机器码进行程序功能测试。在集成测试中,编写汇编测试程序,用编译器编译成机器码,在Cadenee NC下运行这些测试程序进行仿真测试。对每条指令均测试了其各种寻址方式,且测试程序自动向DEBUG寄存器写测试结果,以方便调试。经过复杂的测试和不断修正,验证结果显示MCU指令执行的正确性。
3.2 FPGA验证
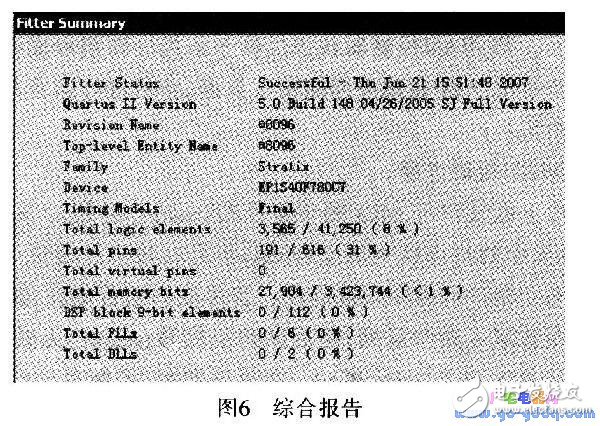
使用的FPGA器件是StraTIxⅡ型号为EP1S40F780C7。综合结果显示:A8096使用3 565个LE(LogIC Element)。时序分析结果:A8096可以运行在49.93 MHz的时钟频率下。A8096占用FPGA资源分布情况如图6所示。
4 结论
本设计中,采用RISC技术中的硬布线控制逻辑,有利于减少MCU面积、降低功耗以及提高MCU执行效率,FPGA实现表明其只占用了3 565个LE单元,工作时钟可达50 MHz。同时该MCU具有很强的扩展性与实用性,应用领域广泛,可方便与定时器、串行通讯接口(I2C)、串行外围接口(SPI)、模数(A/D)转换器等外围功能单元组成各种嵌入式系统,完全具备实际应用价值。
技术专区
- 如何设计一个基于嵌入式系统的智能交通灯控制系统?
- 如何设计一个16位的嵌入式微控制器?
- 在嵌入式系统中如何利用CPLD技术来更加方便的使用DRAM?
- 以C51单片机为核心的嵌入式系统实时控制设计
- 一种关于利用DSP嵌入式技术的赛车刹车控制系统的设计详解




