



随着处理效能、内存密度和系统整合度的提升,嵌入式视觉从传统逐渐扩增到新兴应用领域,市场规模在十年内必有显著增长。而伴随着应用领域越来越多元,影像传感器系统在开发时,所需考虑的面向也变得更加复杂。
视觉系统在各个产业及应用领域中日益普及,甚至每天携带的智能型手机即嵌入式视觉系统的一个例子。这些装置不仅能够从事影像捕捉和影像录制,还能执行扩增虚拟现实的应用。由此可知嵌入式视觉技术有相当高的接受度。
随着处理效能、内存密度和系统整合度的提升,嵌入式视觉从传统逐渐扩增到新兴应用领域(图1)。这使得嵌入式视觉在消费者、产业和政府间被广泛地接受,十年内必有显著增长。

图1 常见的嵌入式视觉应用。
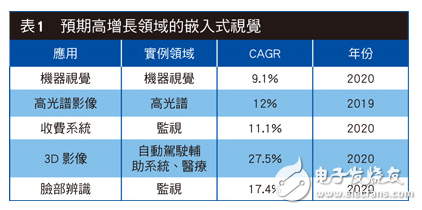
表1列出了一些嵌入式视觉崛起中的领域,其中有一些显而易见,有些则不是很明显。
嵌入式视觉之基本概念
所谓嵌入式视觉系统包含从所选的影像传感器接收光子到系统输出的整个讯号链。从接收端的影像中撷取处理或未处理的影像或信息,并提供予下游系统,而嵌入式系统架构师则负责根据系统要求确保接收到输出过程的效能。
因此,嵌入式视觉系统架构师须要熟悉与传感器和后处理系统相关的各种概念和技术。本文专为入门之专业人士设计,旨在让读者对此技术和概念有一个基本了解。
首先,我们必须熟悉电磁波谱及期望系统运行的光谱域,因为肉眼可辨识的范围仅390nm(蓝光)至700nm(红光)波长间的光谱,亦为可见光谱;而根据选用影像设备的不同,我们却能捕获到更广泛的波长影像包括X光、紫外线、红外线,以及可见光谱。
针对近红外光及以下的光谱范围,我们可以选用电荷耦合组件(CCD)或互补金属氧化物半导体(CMOS1)影像传感器(CIS);到了红外光谱范围,则须使用专用的红外光检测器。红外光谱之所以需要专用的传感器,部分原因在于芯片影像传感器如CCD或CIS需要激发能。这些组件通常需要1eV的光子能量来激发一个电子,然而在红外光谱范围,光子能量介于1.7eV至1.24meV之间,因此红外影像传感器应基于HgCdTe或InSb。这些低激发能的传感器,经常与CMOS的读取IC(ROIC)配合使用,以利传感器的控制与读取。
最常见的两种传感器技术分别是CCD 和CIS:
.电荷耦合组件(CCD)被视为最好的仿真组件,因此若需与数字系统整合,就需要在一定的模拟电压下外加ADC及频率生成功能。每个像素储存由光子产生的电荷,且多数的应用是由2D数组排列成行,每行由多个像素组成。读取CCD时,需透过行与行之间的传输,将每行平行传递到读取缓存器, 再透过读取缓存器将每行串行读取。这个缓存器的读取过程中,会将电荷转换为电压。
.CMOS影像传感器能让ADC、偏压和驱动电路在同一个芯片上做更紧密的整合,可大幅降低系统对整合的需求,并同时提高CIS设计的复杂度。主动像素传感器 (APS)是CIS的核心,其中与CCD的不同在于CIS的每个像素中同时包含一组光电二极管及读取放大器,并能单独读取数组中的任一个像素。
尽管多数的嵌入式视觉皆采用CIS组件,但CCD仍是高端科学研究应用领域中主要采用的传感器。本文所提及的内容适用于CIS或CCD影像技术。
分辨率为传感器选择首要考虑
用户必须对系统有深刻的了解方能选出正确的影像传感器,以下几点是须纳入考虑的要素:
首先,用户必须决定所需的分辨率为何,也就是决定每行中须包含的像素量,以及检测器需多少行。好比说,在天文科学应用的情况下,很可能需用到高分辨率的2D组件,但在工业品管的影像应用上可能只须执行线性扫描。
线性扫描组件由X轴上的单行像素所组成,往往适用于移动中的相机或目标物应用,藉以生成Y轴的影像。通常这类传感器用于检验应用或光学字符识别(OCR)居多。有些领域须采用时域整合(TDI)线性扫描传感器,而这类传感器在X轴由多行所组成,并随着目标移动;而像素也从一个向下一个移动,并随着电荷在时间上整合,以实现更灵敏的检测。
不过,TDI需在行与行间的传输与目标移动间进行同步,以防发生模糊及影像缺陷。由于只有几行须要读取,因此帧率可以相当高。
2D数组中包含多行的像素,而数组大小将决定传感器的最大帧率。通常为了实现更高的帧率,并将2D组件平行读取多个像素。除此之外,2D组件亦可执行窗口操作(又称为感兴趣区域,ROI),并读取特定感兴趣的区域,以获得更高的帧率。这类组件可用于众多领域,而且信息包含在2D影像中,例如先进辅助驾驶系统(ADAS)、监控或科学研究领域。
在决定了影像感测的格式及所需分辨率后,再来必须考虑的是「像素间距」。因为它决定了像素的大小,而这关系到入射光子所产生的电荷有多少能够被收集。因此,较小的像素间距意味着在一个整合周期内(传感器暴露于影像中的时间)能够收集较少的电荷。若像素间距较小,则意味着捕捉影像需要更长的整合时间,这会影响到传感器捕捉快速移动中影像的能力,并且使得低光源拍照效能下降。
技术专区
- Alexa语音服务软件扩展STM32Cube
- 结合DNN API驱动未来神经网络应用的解决方案
- 针对于高端移动通信和汽车市场的四集群设计
- 一款基于帧捕捉的开源图形调试器应用设计
- 即将成为标准配置的最新安全技术:后视摄像系统




